 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoordiNet: uncertainty-aware pose regressor for reliable vehicle localization
Paper and Code
Mar 19, 2021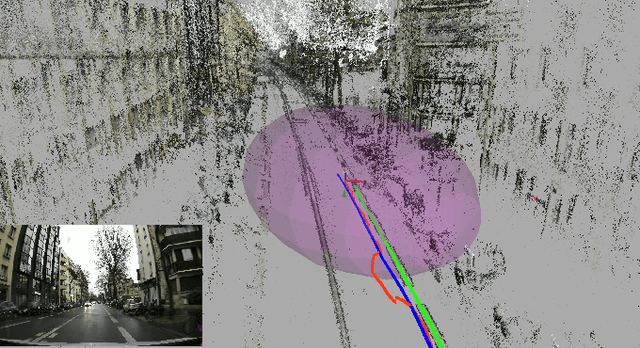
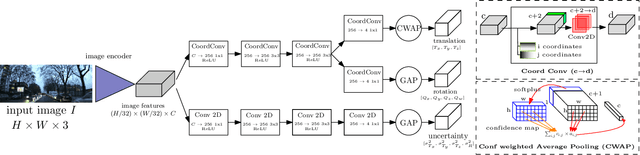

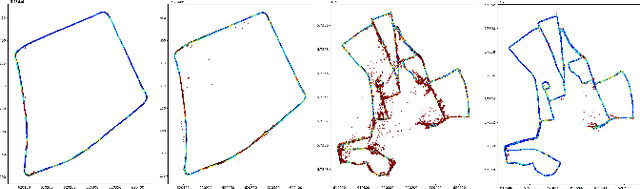
In this paper, we investigate visual-based camera localization with neural networks for robotics and autonomous vehicles applications. Our solution is a CNN-based algorithm which predicts camera pose (3D translation and 3D rotation) directly from a single image. It also provides an uncertainty estimate of the pose. Pose and uncertainty are learned together with a single loss function. Furthermore, we propose a new fully convolutional architecture, named CoordiNet, designed to embed some of the scene geometry. Our framework outperforms comparable methods on the largest available benchmark, the Oxford RobotCar dataset, with an average error of 8 meters where previous best was 19 meters. We have also investigated the performance of our method on large scenes for real time (18 fps) vehicle localization. In this setup, structure-based methods require a large database, and we show that our proposal is a reliable alternative, achieving 29cm median error in a 1.9km loop in a busy urban area.