 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Quasi-centralized Collision-free Path Planning Approach for Multi-Robot Systems
Paper and Code
Mar 18, 2021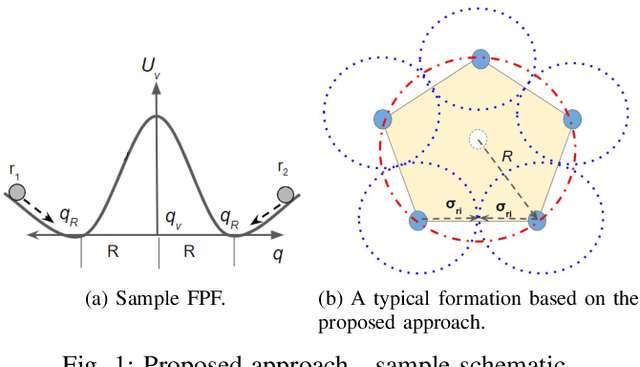
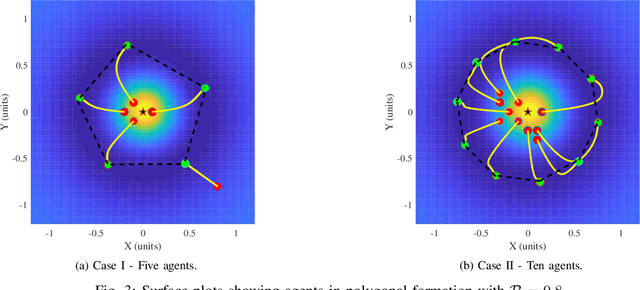
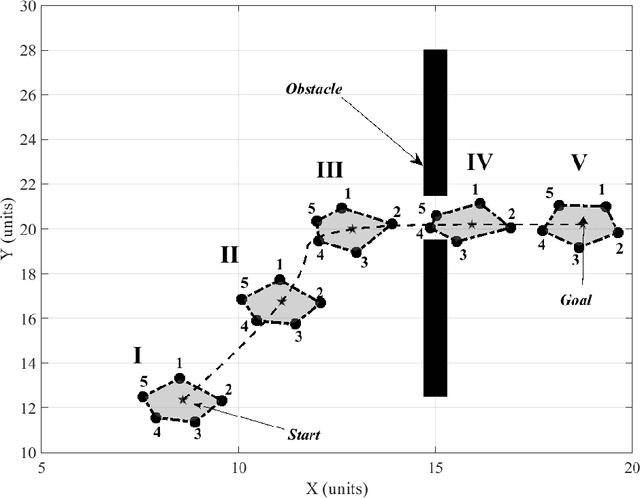
This paper presents a novel quasi-centralized approach for collision-free path planning of multi-robot systems (MRS) in obstacle-ridden environments. A new formation potential fields (FPF) concept is proposed around a virtual agent, located at the center of the formation which ensures self-organization and maintenance of the formation. The path of the virtual agent is centrally planned and the robots at the minima of the FPF are forced to move along with the virtual agent. In the neighborhood of obstacles, individual robots selfishly avoid collisions, thus marginally deviating from the formation. The proposed quasi-centralized approach introduces formation flexibility into the MRS, which enables MRS to effectively navigate in an obstacle-ridden workspace. Methodical analysis of the proposed approach and guidelines for selecting the FPF are presented. Results using a candidate FPF are shown that ensure a pentagonal formation effectively squeezes through a narrow passage avoiding any collisions with the walls.