 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Modeling and MPC for Locomotion of Tendon-Driven Soft Quadruped
Feb 18, 2026SLOT (Soft Legged Omnidirectional Tetrapod), a tendon-driven soft quadruped robot with 3D-printed TPU legs, is presented to study physics-informed modeling and control of compliant legged locomotion using only four actuators. Each leg is modeled as a deformable continuum using discrete Cosserat rod theory, enabling the capture of large bending deformations, distributed elasticity, tendon actuation, and ground contact interactions. A modular whole-body modeling framework is introduced, in which compliant leg dynamics are represented through physically consistent reaction forces applied to a rigid torso, providing a scalable interface between continuum soft limbs and rigid-body locomotion dynamics. This formulation allows efficient whole-body simulation and real-time control without sacrificing physical fidelity. The proposed model is embedded into a convex model predictive control framework that optimizes ground reaction forces over a 0.495 s prediction horizon and maps them to tendon actuation through a physics-informed force-angle relationship. The resulting controller achieves asymptotic stability under diverse perturbations. The framework is experimentally validated on a physical prototype during crawling and walking gaits, achieving high accuracy with less than 5 mm RMSE in center of mass trajectories. These results demonstrate a generalizable approach for integrating continuum soft legs into model-based locomotion control, advancing scalable and reusable modeling and control methods for soft quadruped robots.
A Quasi-centralized Collision-free Path Planning Approach for Multi-Robot Systems
Mar 18, 2021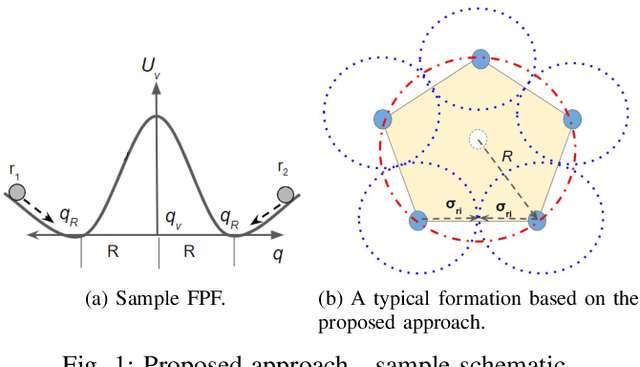
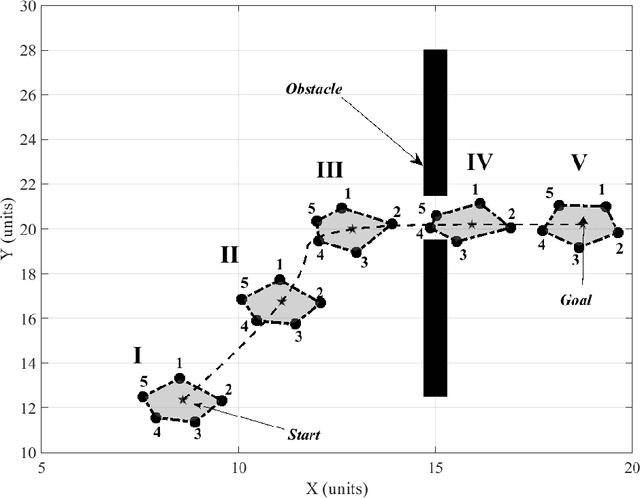
This paper presents a novel quasi-centralized approach for collision-free path planning of multi-robot systems (MRS) in obstacle-ridden environments. A new formation potential fields (FPF) concept is proposed around a virtual agent, located at the center of the formation which ensures self-organization and maintenance of the formation. The path of the virtual agent is centrally planned and the robots at the minima of the FPF are forced to move along with the virtual agent. In the neighborhood of obstacles, individual robots selfishly avoid collisions, thus marginally deviating from the formation. The proposed quasi-centralized approach introduces formation flexibility into the MRS, which enables MRS to effectively navigate in an obstacle-ridden workspace. Methodical analysis of the proposed approach and guidelines for selecting the FPF are presented. Results using a candidate FPF are shown that ensure a pentagonal formation effectively squeezes through a narrow passage avoiding any collisions with the walls.
Dynamic Prioritization for Conflict-Free Path Planning of Multi-Robot Systems
Jan 06, 2021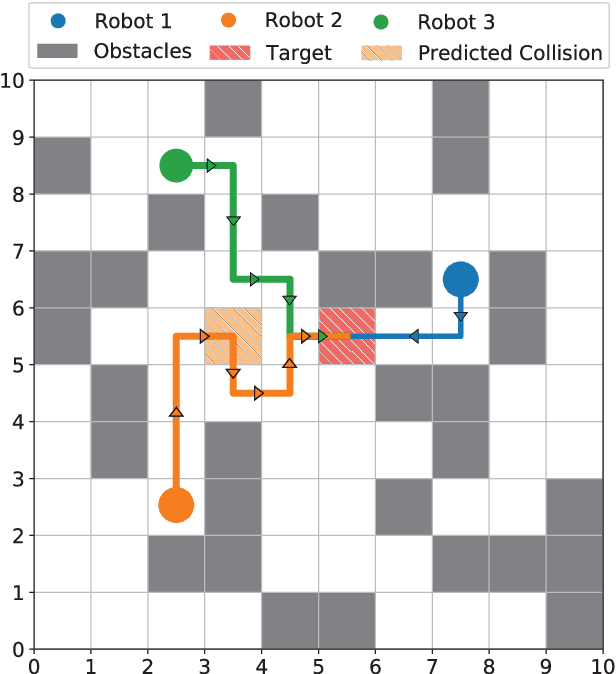
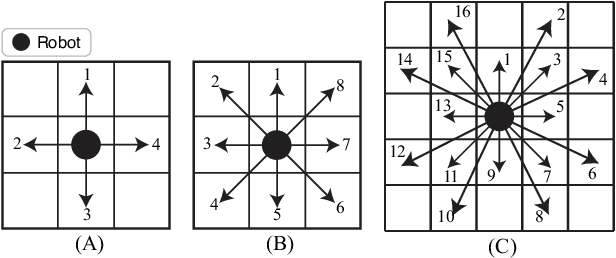
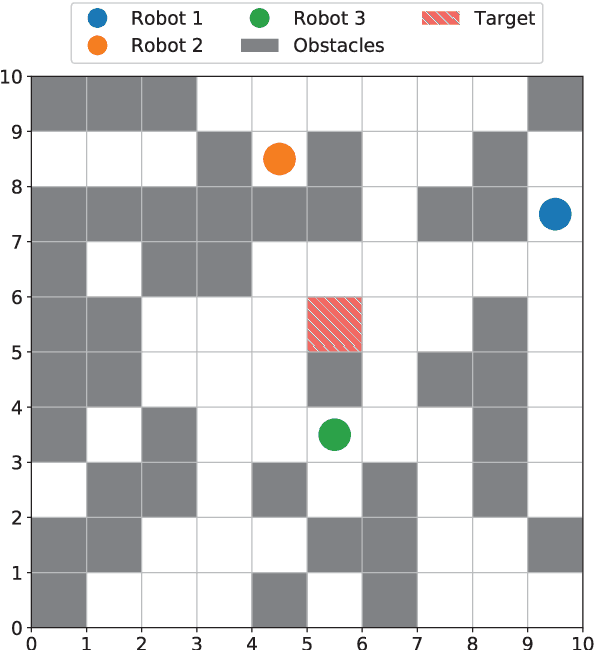
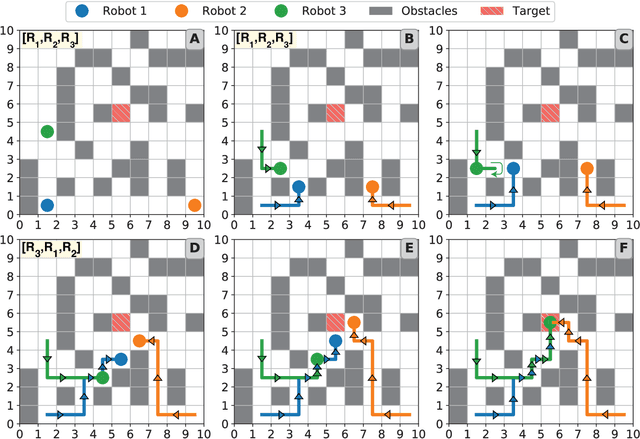
Planning collision-free paths for multi-robot systems (MRS) is a challenging problem because of the safety and efficiency constraints required for real-world solutions. Even though coupled path planning approaches provide optimal collision-free paths for each agent of the MRS, they search the composite space of all the agents and therefore, suffer from exponential increase in computation with the number of robots. On the other hand, prioritized approaches provide a practical solution to applications with large number of robots, especially when path computation time and collision avoidance take precedence over guaranteed globally optimal solution. While most centrally-planned algorithms use static prioritization, a dynamic prioritization algorithm, PD*, is proposed that employs a novel metric, called freedom index, to decide the priority order of the robots at each time step. This allows the PD* algorithm to simultaneously plan the next step for all robots while ensuring collision-free operation in obstacle ridden environments. Extensive simulations were performed to test and compare the performance of the proposed PD* scheme with other state-of-the-art algorithms. It was found that PD* improves upon the computational time by 25% while providing solutions of similar path lengths. Increase in efficiency was particularly prominent in scenarios with large number of robots and/or higher obstacle densities, where the probability of collisions is higher, suggesting the suitability of PD* in solving such problems.