Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetecting Anomalous Swarming Agents with Graph Signal Processing
Paper and Code
Mar 17, 2021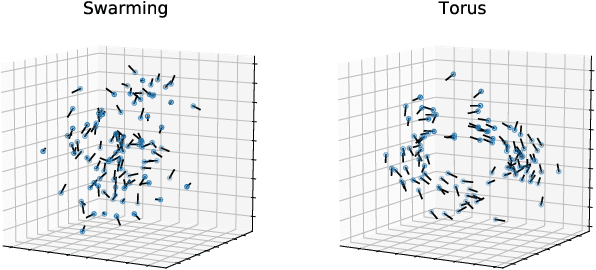
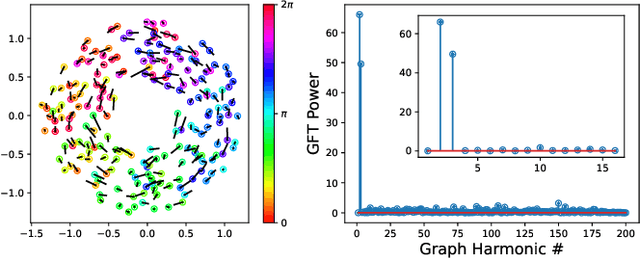
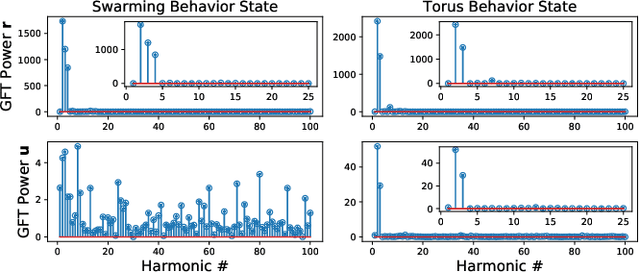
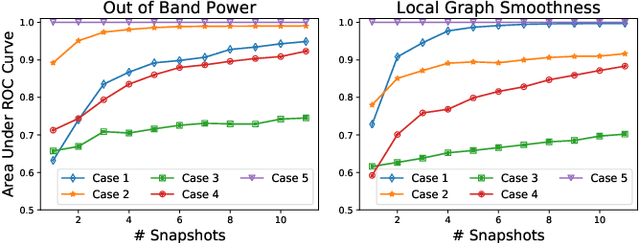
Collective motion among biological organisms such as insects, fish, and birds has motivated considerable interest not only in biology but also in distributed robotic systems. In a robotic or biological swarm, anomalous agents (whether malfunctioning or nefarious) behave differently than the normal agents and attempt to hide in the "chaos" of the swarm. By defining a graph structure between agents in a swarm, we can treat the agents' properties as a graph signal and use tools from the field of graph signal processing to understand local and global swarm properties. Here, we leverage this idea to show that anomalous agents can be effectively detected using their impacts on the graph Fourier structure of the swarm.
* Submitted to IEEE ICAS 2021
View paper on