 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdversarial Driving: Attacking End-to-End Autonomous Driving Systems
Paper and Code
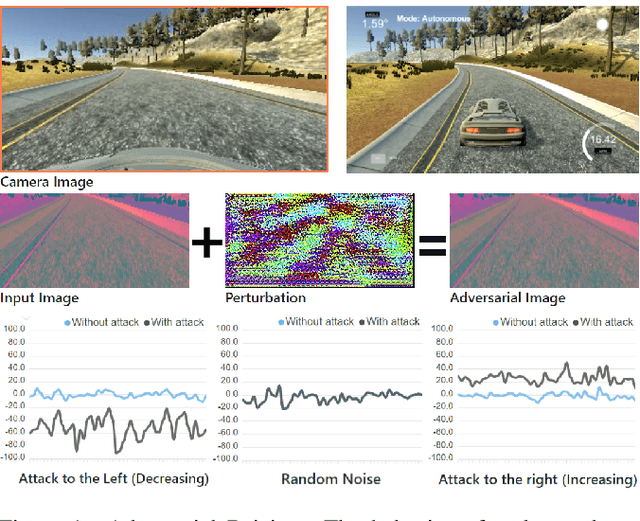
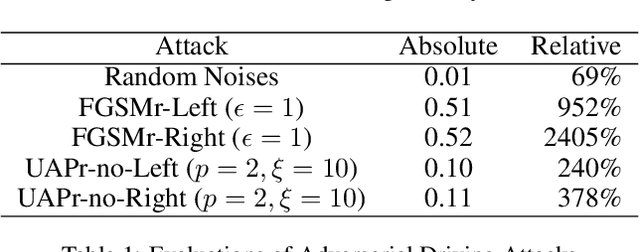
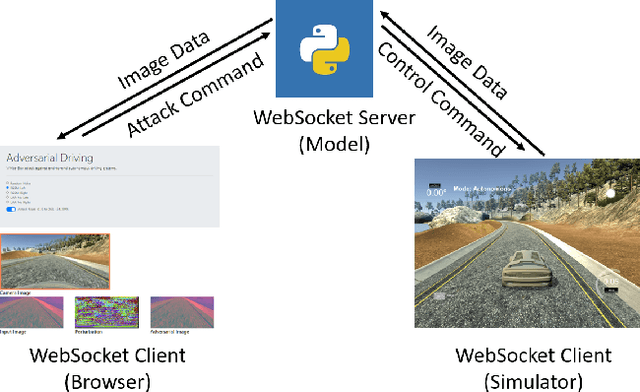
As the research in deep neural networks advances, deep convolutional networks become feasible for automated driving tasks. There is an emerging trend of employing end-to-end models in the automation of driving tasks. However, previous research unveils that deep neural networks are vulnerable to adversarial attacks in classification tasks. While for regression tasks such as autonomous driving, the effect of these attacks remains rarely explored. In this research, we devise two white-box targeted attacks against end-to-end autonomous driving systems. The driving model takes an image as input and outputs the steering angle. Our attacks can manipulate the behaviour of the autonomous driving system only by perturbing the input image. Both attacks can be initiated in real-time on CPUs without employing GPUs. This demo aims to raise concerns over applications of end-to-end models in safety-critical systems.