 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D-FFS: Faster 3D object detection with Focused Frustum Search in sensor fusion based networks
Paper and Code
Mar 15, 2021
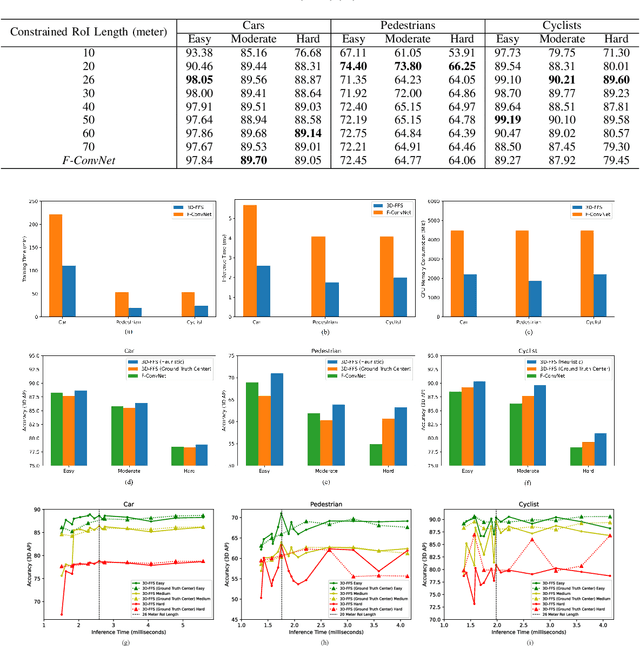
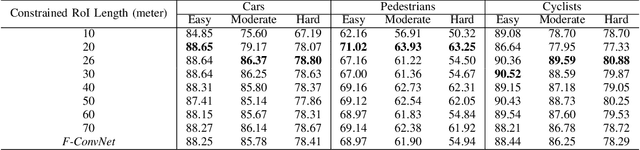
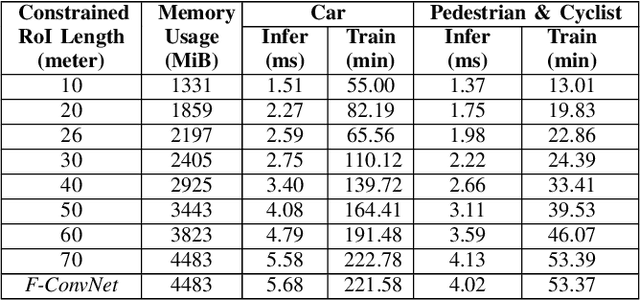
In this work we propose 3D-FFS, a novel approach to make sensor fusion based 3D object detection networks significantly faster using a class of computationally inexpensive heuristics. Existing sensor fusion based networks generate 3D region proposals by leveraging inferences from 2D object detectors. However, as images have no depth information, these networks rely on extracting semantic features of points from the entire scene to locate the object. By leveraging aggregated intrinsic properties (e.g. point density) of the 3D point cloud data, 3D-FFS can substantially constrain the 3D search space and thereby significantly reduce training time, inference time and memory consumption without sacrificing accuracy. To demonstrate the efficacy of 3D-FFS, we have integrated it with Frustum ConvNet (F-ConvNet), a prominent sensor fusion based 3D object detection model. We assess the performance of 3D-FFS on the KITTI dataset. Compared to F-ConvNet, we achieve improvements in training and inference times by up to 62.84% and 56.46%, respectively, while reducing the memory usage by up to 58.53%. Additionally, we achieve 0.59%, 2.03% and 3.34% improvements in accuracy for the Car, Pedestrian and Cyclist classes, respectively. 3D-FFS shows a lot of promise in domains with limited computing power, such as autonomous vehicles, drones and robotics where LiDAR-Camera based sensor fusion perception systems are widely used.