 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning One Representation to Optimize All Rewards
Paper and Code
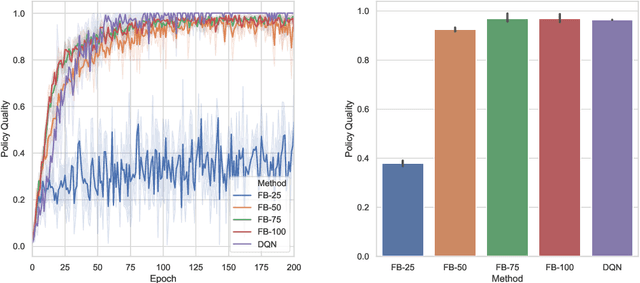
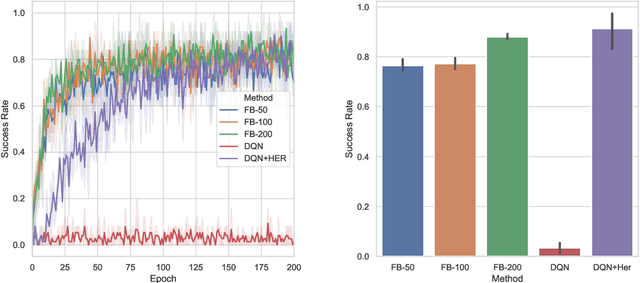
We introduce the forward-backward (FB) representation of the dynamics of a reward-free Markov decision process. It provides explicit near-optimal policies for any reward specified a posteriori. During an unsupervised phase, we use reward-free interactions with the environment to learn two representations via off-the-shelf deep learning methods and temporal difference (TD) learning. In the test phase, a reward representation is estimated either from observations or an explicit reward description (e.g., a target state). The optimal policy for that reward is directly obtained from these representations, with no planning. The unsupervised FB loss is well-principled: if training is perfect, the policies obtained are provably optimal for any reward function. With imperfect training, the sub-optimality is proportional to the unsupervised approximation error. The FB representation learns long-range relationships between states and actions, via a predictive occupancy map, without having to synthesize states as in model-based approaches. This is a step towards learning controllable agents in arbitrary black-box stochastic environments. This approach compares well to goal-oriented RL algorithms on discrete and continuous mazes, pixel-based MsPacman, and the FetchReach virtual robot arm. We also illustrate how the agent can immediately adapt to new tasks beyond goal-oriented RL.