 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic constraints to represent common sense required in household actions for multi-modal Learning-from-observation robot
Paper and Code
Mar 03, 2021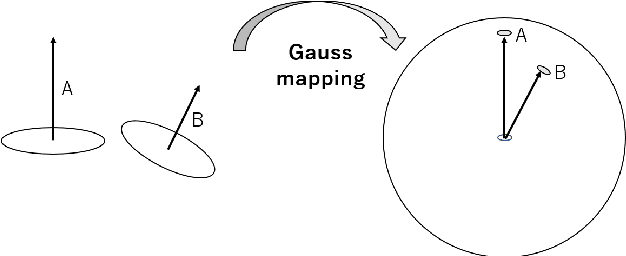
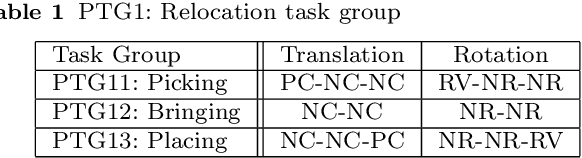
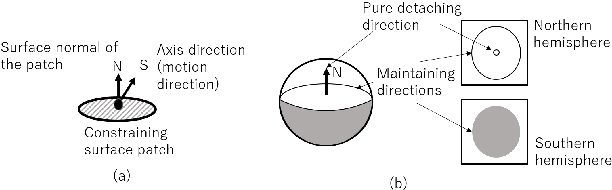
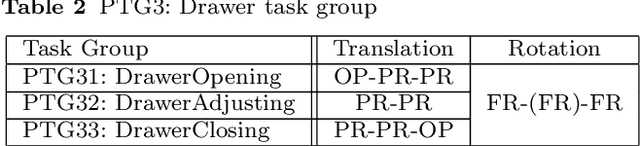
The paradigm of learning-from-observation (LfO) enables a robot to learn how to perform actions by observing human-demonstrated actions. Previous research in LfO have mainly focused on the industrial domain which only consist of the observable physical constraints between a manipulating tool and the robot's working environment. In order to extend this paradigm to the household domain which consists non-observable constraints derived from a human's common sense; we introduce the idea of semantic constraints. The semantic constraints are represented similar to the physical constraints by defining a contact with an imaginary semantic environment. We thoroughly investigate the necessary and sufficient set of contact state and state transitions to understand the different types of physical and semantic constraints. We then apply our constraint representation to analyze various actions in top hit household YouTube videos and real home cooking recordings. We further categorize the frequently appearing constraint patterns into physical, semantic, and multistage task groups and verify that these groups are not only necessary but a sufficient set for covering standard household actions. Finally, we conduct a preliminary experiment using textual input to explore the possibilities of combining verbal and visual input for recognizing the task groups. Our results provide promising directions for incorporating common sense in the literature of robot teaching.