Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Optimized Distributed Multi-Robot Printing: An Algorithmic Approach
Paper and Code
Mar 14, 2021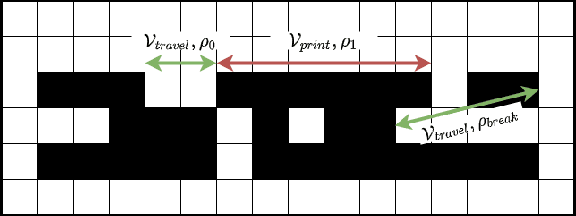
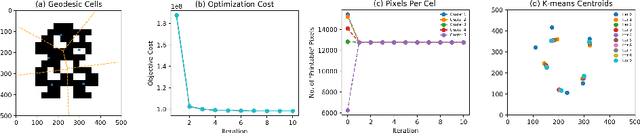
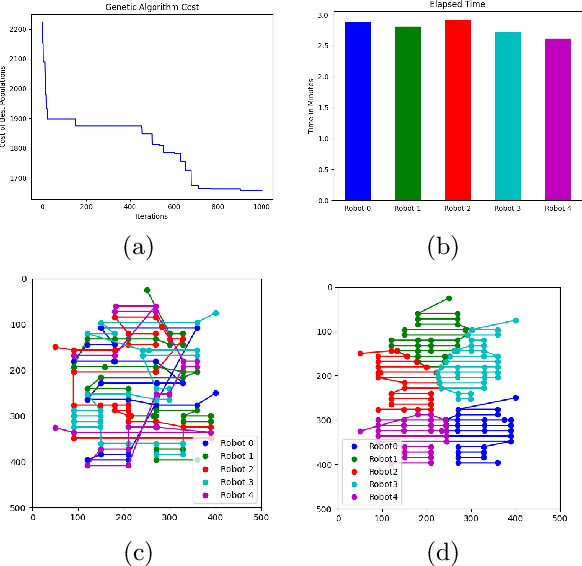
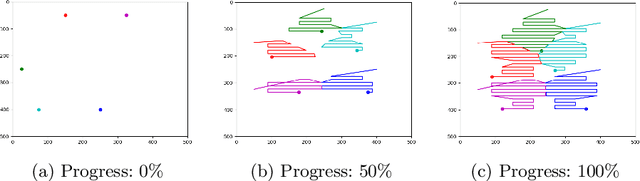
This paper presents a distributed multi-robot printing method which utilizes an optimization approach to decompose and allocate a printing task to a group of mobile robots. The motivation for this problem is to minimize the printing time of the robots by using an appropriate task decomposition algorithm. We present one such algorithm which decomposes an image into rasterized geodesic cells before allocating them to the robots for printing. In addition to this, we also present the design of a numerically controlled holonomic robot capable of spraying ink on smooth surfaces. Further, we use this robot to experimentally verify the results of this paper.
* International Symposium On Swarm Behavior And Bio-Inspired Robotics,
2021
View paper on