 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Deterministic Multi-Agent Reinforcement Learning
Paper and Code
Feb 19, 2021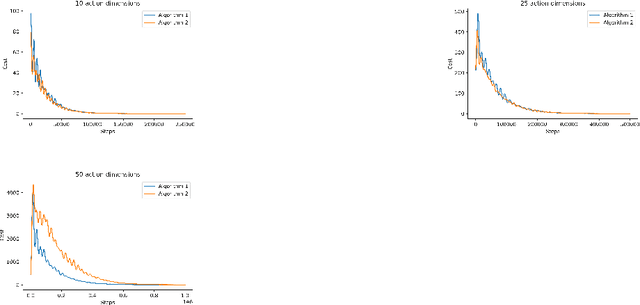
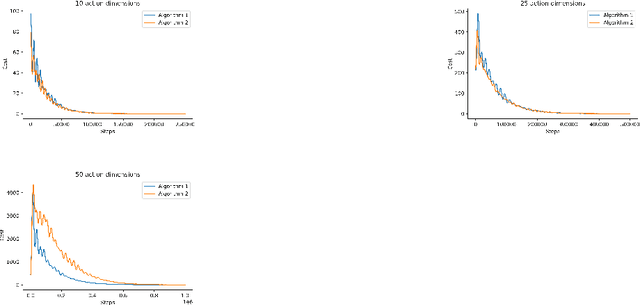
[Zhang, ICML 2018] provided the first decentralized actor-critic algorithm for multi-agent reinforcement learning (MARL) that offers convergence guarantees. In that work, policies are stochastic and are defined on finite action spaces. We extend those results to offer a provably-convergent decentralized actor-critic algorithm for learning deterministic policies on continuous action spaces. Deterministic policies are important in real-world settings. To handle the lack of exploration inherent in deterministic policies, we consider both off-policy and on-policy settings. We provide the expression of a local deterministic policy gradient, decentralized deterministic actor-critic algorithms and convergence guarantees for linearly-approximated value functions. This work will help enable decentralized MARL in high-dimensional action spaces and pave the way for more widespread use of MARL.