 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards automatic extraction and validation of on-street parking spaces using park-out events data
Paper and Code
Feb 12, 2021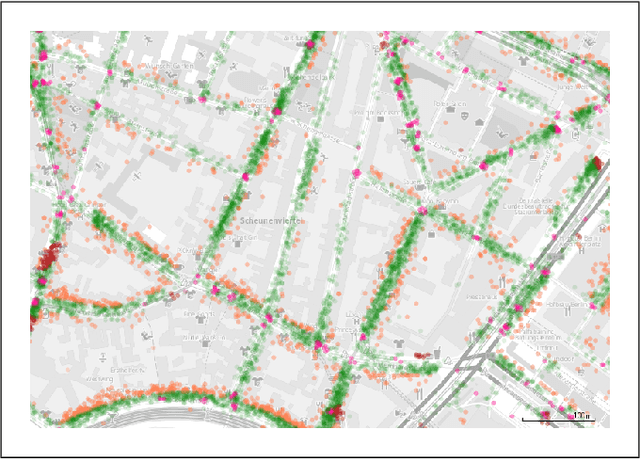

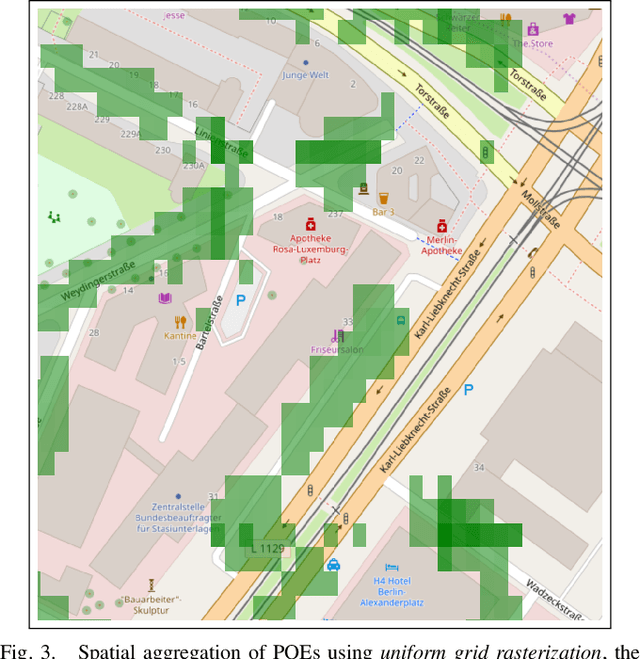
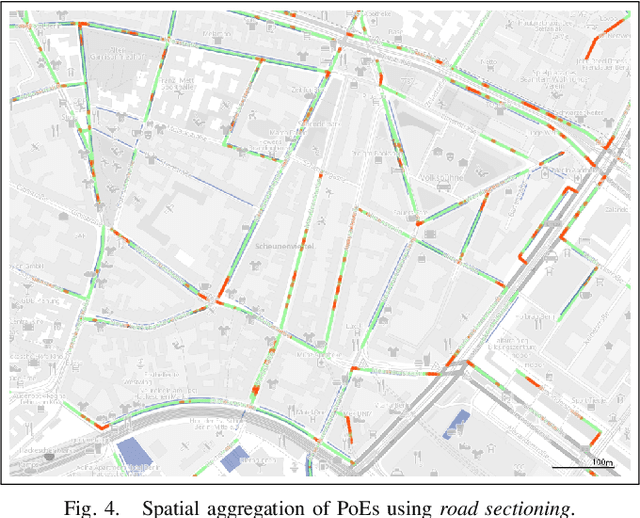
This article proposes two different approaches to automatically create a map for valid on-street car parking spaces. For this, we use park-out events data from car2go. The first one uses spatial aggregation and the second a machine learning algorithm. For the former, we chose rasterization and road sectioning; for the latter we chose decision trees. We compare the results of these approaches and discuss their advantages and disadvantages. Furthermore, we show our results for a neighborhood in the city of Berlin and report a classification accuracy of 92% on the original imbalanced data. Finally, we discuss further work; from gathering more data over a longer period of time to fitting spatial Gaussian densities to the data and the usage of apps for manual validation and annotation of parking spaces to improve ground truth data.