 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCounting and Locating High-Density Objects Using Convolutional Neural Network
Paper and Code
Feb 08, 2021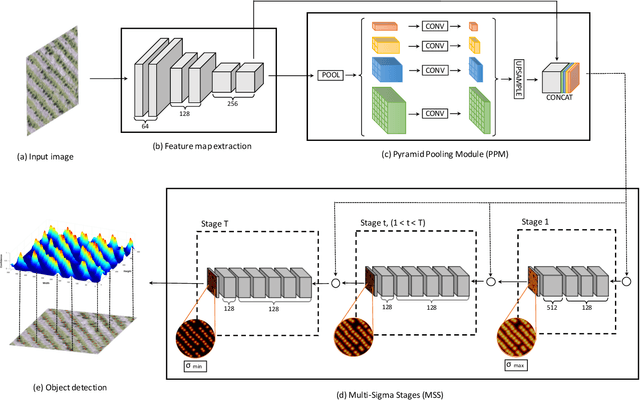
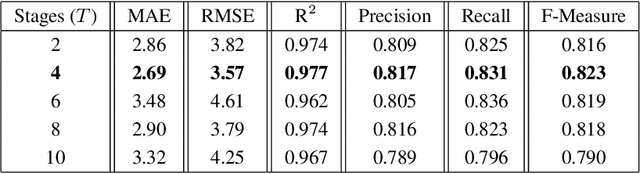
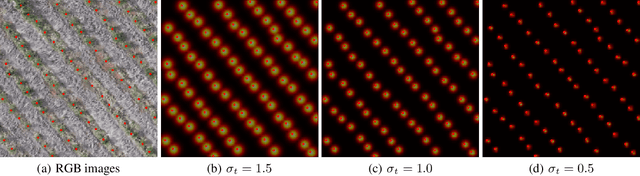

This paper presents a Convolutional Neural Network (CNN) approach for counting and locating objects in high-density imagery. To the best of our knowledge, this is the first object counting and locating method based on a feature map enhancement and a Multi-Stage Refinement of the confidence map. The proposed method was evaluated in two counting datasets: tree and car. For the tree dataset, our method returned a mean absolute error (MAE) of 2.05, a root-mean-squared error (RMSE) of 2.87 and a coefficient of determination (R$^2$) of 0.986. For the car dataset (CARPK and PUCPR+), our method was superior to state-of-the-art methods. In the these datasets, our approach achieved an MAE of 4.45 and 3.16, an RMSE of 6.18 and 4.39, and an R$^2$ of 0.975 and 0.999, respectively. The proposed method is suitable for dealing with high object-density, returning a state-of-the-art performance for counting and locating objects.