 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Deep Learning Approach Based on Graphs to Detect Plantation Lines
Paper and Code
Feb 05, 2021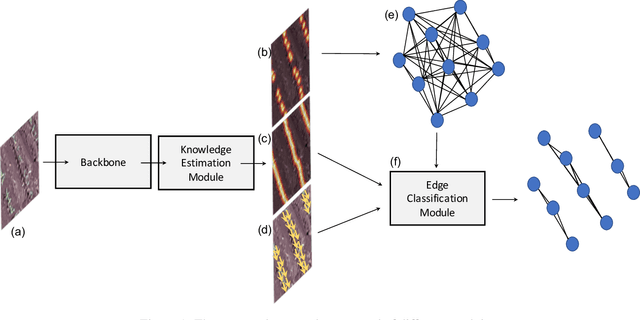
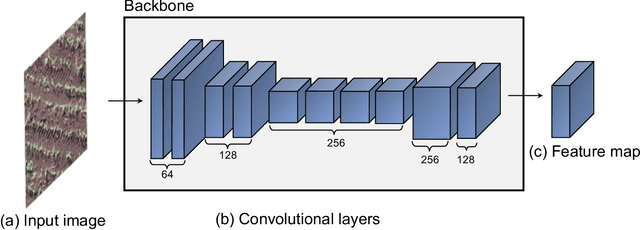
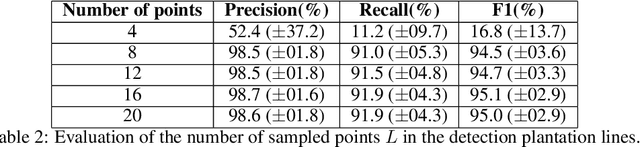
Deep learning-based networks are among the most prominent methods to learn linear patterns and extract this type of information from diverse imagery conditions. Here, we propose a deep learning approach based on graphs to detect plantation lines in UAV-based RGB imagery presenting a challenging scenario containing spaced plants. The first module of our method extracts a feature map throughout the backbone, which consists of the initial layers of the VGG16. This feature map is used as an input to the Knowledge Estimation Module (KEM), organized in three concatenated branches for detecting 1) the plant positions, 2) the plantation lines, and 3) for the displacement vectors between the plants. A graph modeling is applied considering each plant position on the image as vertices, and edges are formed between two vertices (i.e. plants). Finally, the edge is classified as pertaining to a certain plantation line based on three probabilities (higher than 0.5): i) in visual features obtained from the backbone; ii) a chance that the edge pixels belong to a line, from the KEM step; and iii) an alignment of the displacement vectors with the edge, also from KEM. Experiments were conducted in corn plantations with different growth stages and patterns with aerial RGB imagery. A total of 564 patches with 256 x 256 pixels were used and randomly divided into training, validation, and testing sets in a proportion of 60\%, 20\%, and 20\%, respectively. The proposed method was compared against state-of-the-art deep learning methods, and achieved superior performance with a significant margin, returning precision, recall, and F1-score of 98.7\%, 91.9\%, and 95.1\%, respectively. This approach is useful in extracting lines with spaced plantation patterns and could be implemented in scenarios where plantation gaps occur, generating lines with few-to-none interruptions.