 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning Generalization and the Convex Hull of Training Sets
Paper and Code
Jan 25, 2021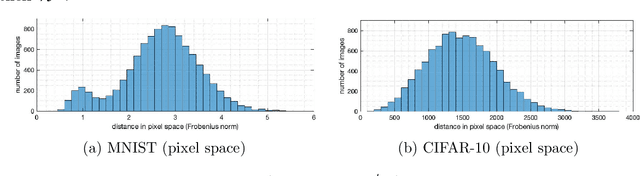

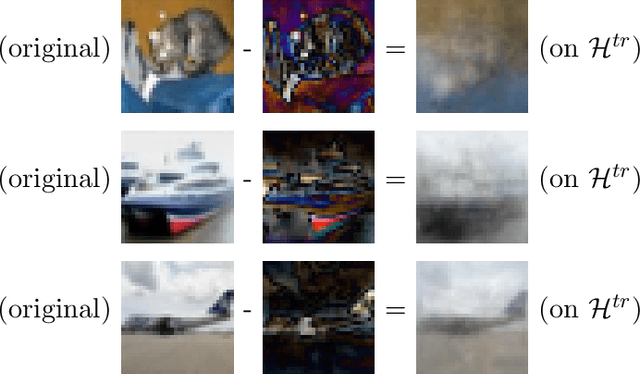
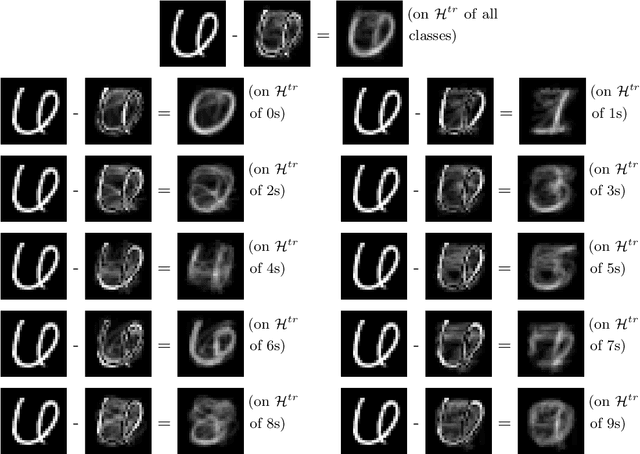
We study the generalization of deep learning models in relation to the convex hull of their training sets. A trained image classifier basically partitions its domain via decision boundaries and assigns a class to each of those partitions. The location of decision boundaries inside the convex hull of training set can be investigated in relation to the training samples. However, our analysis shows that in standard image classification datasets, all testing images are considerably outside that convex hull, in the pixel space, in the wavelet space, and in the internal representations learned by deep networks. Therefore, the performance of a trained model partially depends on how its decision boundaries are extended outside the convex hull of its training data. From this perspective which is not studied before, over-parameterization of deep learning models may be considered a necessity for shaping the extension of decision boundaries. At the same time, over-parameterization should be accompanied by a specific training regime, in order to yield a model that not only fits the training set, but also its decision boundaries extend desirably outside the convex hull. To illustrate this, we investigate the decision boundaries of a neural network, with various degrees of parameters, inside and outside the convex hull of its training set. Moreover, we use a polynomial decision boundary to study the necessity of over-parameterization and the influence of training regime in shaping its extensions outside the convex hull of training set.