 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSEAN-EP: A Platform for Collecting Human Feedback for Social Robot Navigation at Scale
Paper and Code

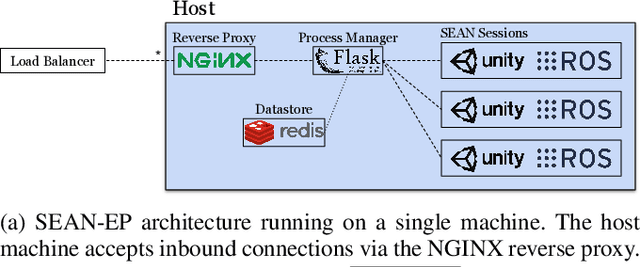
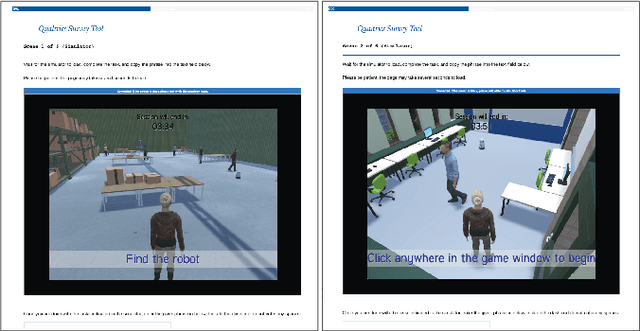
We introduce the SEAN Experimental Platform (SEAN-EP), an open-source system that allows roboticists to gather human feedback for social robot navigation at scale using online interactive simulations. Through SEAN-EP, remote users can control the motion of a human avatar via their web browser and interact with a virtual robot controlled through the Robot Operating System. Heavy computation in SEAN-EP is delegated to cloud servers such that users do not need specialized hardware to take part in the simulations. We validated SEAN-EP and its usability through an online survey, and compared the data collected from this survey with a similar video survey. Our results suggest that human perceptions of robots may differ based on whether they interact with the robots in simulation or observe them in videos. Also, our study suggests that people may perceive the surveys with interactive simulations as less mentally demanding than video surveys.