 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCrowd Vetting: Rejecting Adversaries via Collaboration--with Application to Multi-Robot Flocking
Paper and Code
Dec 11, 2020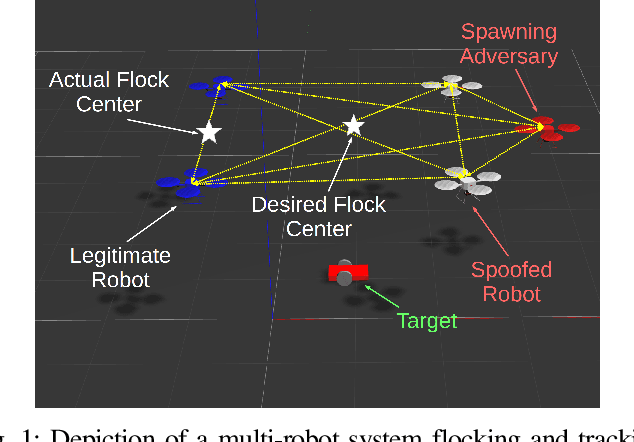
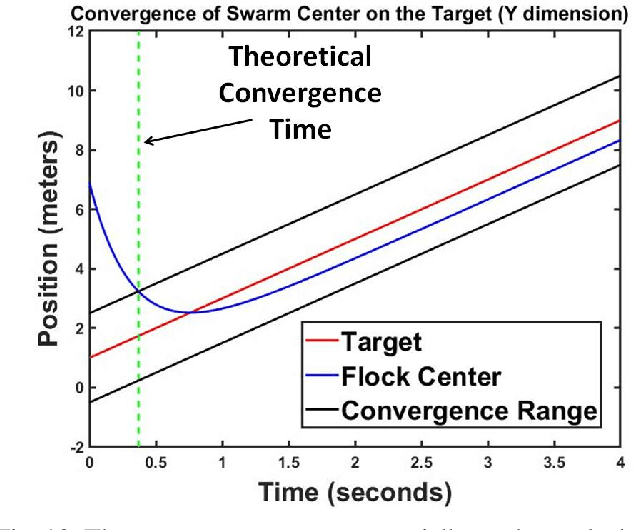
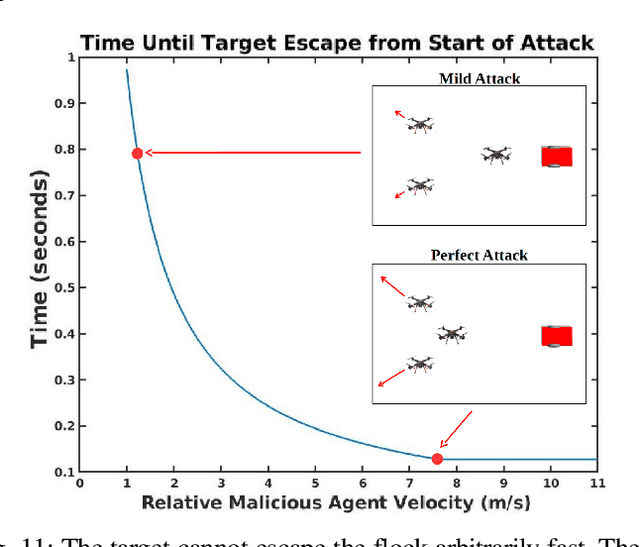
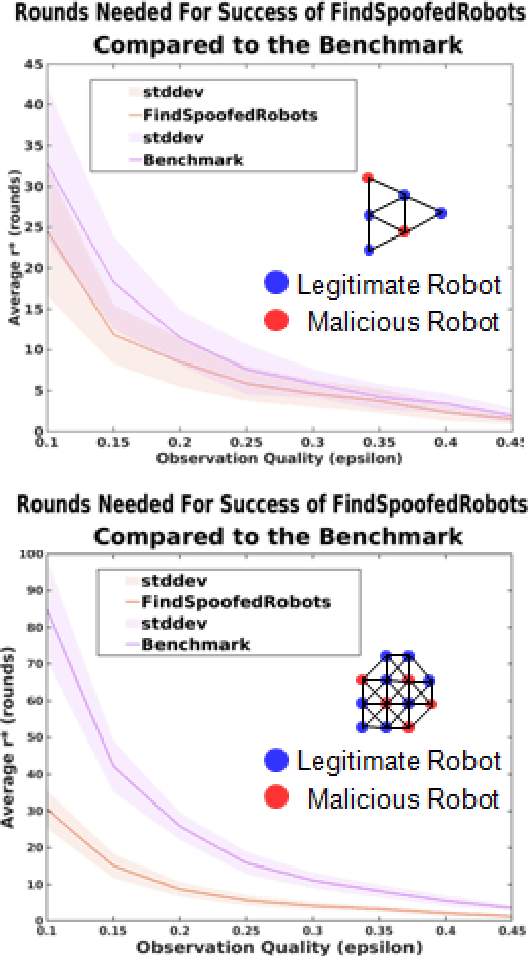
We characterize the advantage of using a robot's neighborhood to find and eliminate adversarial robots in the presence of a Sybil attack. We show that by leveraging the opinions of its neighbors on the trustworthiness of transmitted data, robots can detect adversaries with high probability. We characterize a number of communication rounds required to achieve this result to be a function of the communication quality and the proportion of legitimate to malicious robots. This result enables increased resiliency of many multi-robot algorithms. Because our results are finite time and not asymptotic, they are particularly well-suited for problems with a time critical nature. We develop two algorithms, \emph{FindSpoofedRobots} that determines trusted neighbors with high probability, and \emph{FindResilientAdjacencyMatrix} that enables distributed computation of graph properties in an adversarial setting. We apply our methods to a flocking problem where a team of robots must track a moving target in the presence of adversarial robots. We show that by using our algorithms, the team of robots are able to maintain tracking ability of the dynamic target.