 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCircuitBot: Learning to Survive with Robotic Circuit Drawing
Paper and Code
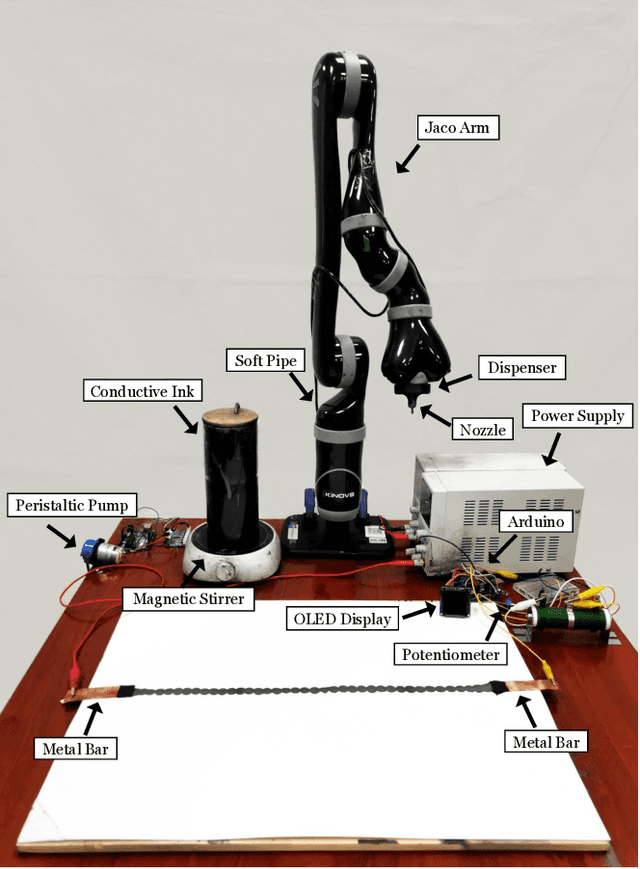
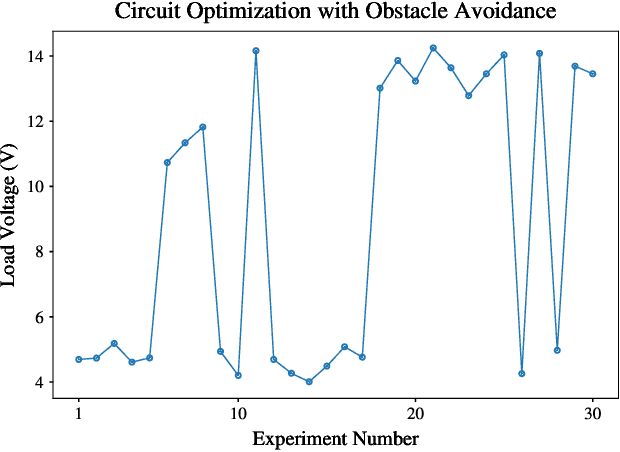
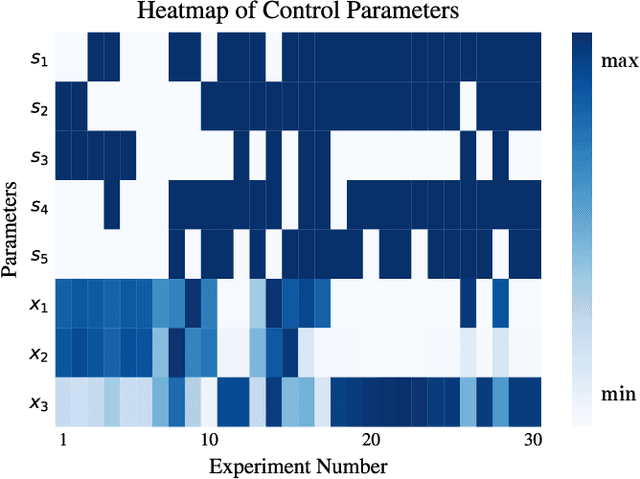
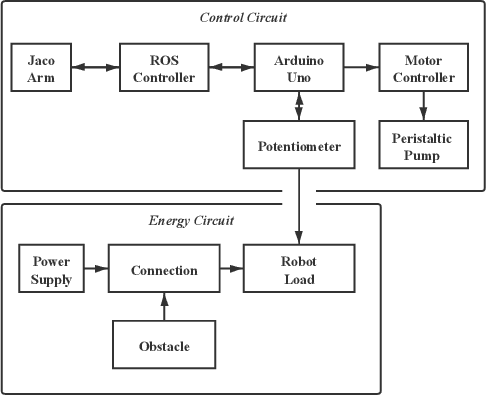
Robots with the ability to actively acquire power from surroundings will be greatly beneficial for long-term autonomy, and to survive in dynamic, uncertain environments. In this work, a scenario is presented where a robot has limited energy, and the only way to survive is to access the energy from a power source. With no cables or wires available, the robot learns to construct an electrical path and avoid potential obstacles during the connection. We present this robot, capable of drawing connected circuit patterns with graphene-based conductive ink. A state-of-the-art Mix-Variable Bayesian Optimization is adopted to optimize the placement of conductive shapes to maximize the power this robot receives. Our results show that, within a small number of trials, the robot learns to build parallel circuits to maximize the voltage received and avoid obstacles which steal energy from the robot.