 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhere am I? SLAM for Mobile Machines on A Smart Working Site
Paper and Code
Nov 05, 2020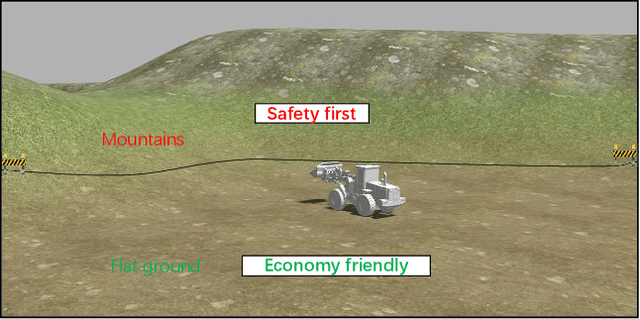
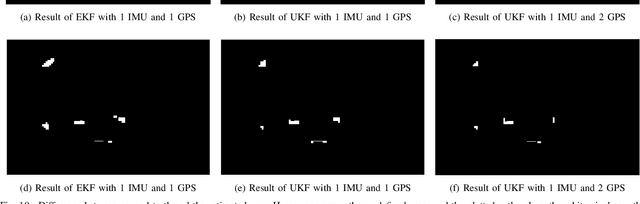
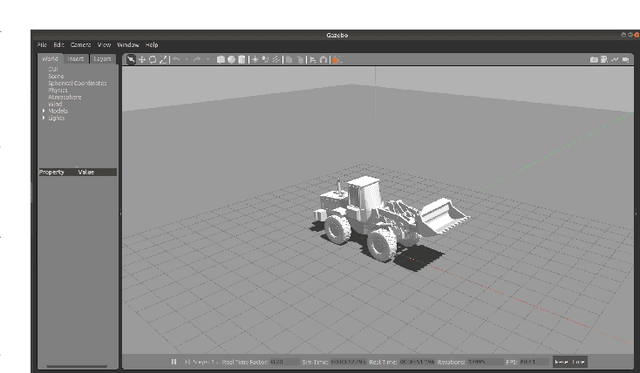
The current optimization approaches of construction machinery are mainly based on internal sensors. However, the decision of a reasonable strategy is not only determined by its intrinsic signals, but also very strongly by environmental information, especially the terrain. Due to the dynamically changing of the construction site and the consequent absence of a high definition map, the Simultaneous Localization and Mapping (SLAM) offering the terrain information for construction machines is still challenging. Current SLAM technologies proposed for mobile machines are strongly dependent on costly or computationally expensive sensors, such as RTK GPS and cameras, so that commercial use is rare. In this study, we proposed an affordable SLAM method to create a multi-layer gird map for the construction site so that the machine can have the environmental information and be optimized accordingly. Concretely, after the machine passes by, we can get the local information and record it. Combining with positioning technology, we then create a map of the interesting places of the construction site. As a result of our research gathered from Gazebo, we showed that a suitable layout is the combination of 1 IMU and 2 differential GPS antennas using the unscented Kalman filter, which keeps the average distance error lower than 2m and the mapping error lower than 1.3% in the harsh environment. As an outlook, our SLAM technology provides the cornerstone to activate many efficiency improvement approaches.