 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning with Efficient Active Feature Acquisition
Paper and Code
Nov 02, 2020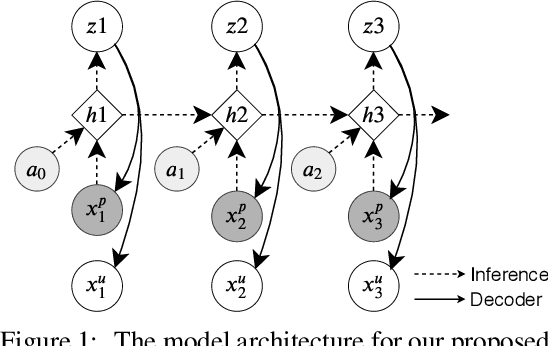
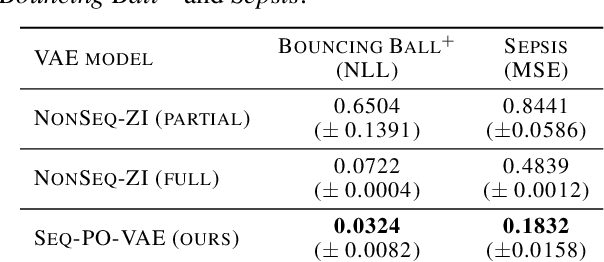
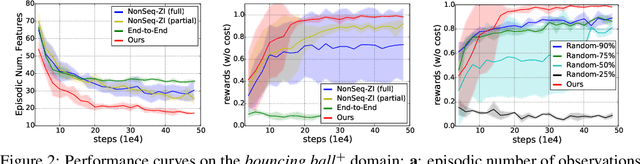

Solving real-life sequential decision making problems under partial observability involves an exploration-exploitation problem. To be successful, an agent needs to efficiently gather valuable information about the state of the world for making rewarding decisions. However, in real-life, acquiring valuable information is often highly costly, e.g., in the medical domain, information acquisition might correspond to performing a medical test on a patient. This poses a significant challenge for the agent to perform optimally for the task while reducing the cost for information acquisition. In this paper, we propose a model-based reinforcement learning framework that learns an active feature acquisition policy to solve the exploration-exploitation problem during its execution. Key to the success is a novel sequential variational auto-encoder that learns high-quality representations from partially observed states, which are then used by the policy to maximize the task reward in a cost efficient manner. We demonstrate the efficacy of our proposed framework in a control domain as well as using a medical simulator. In both tasks, our proposed method outperforms conventional baselines and results in policies with greater cost efficiency.