 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMy Body is a Cage: the Role of Morphology in Graph-Based Incompatible Control
Paper and Code
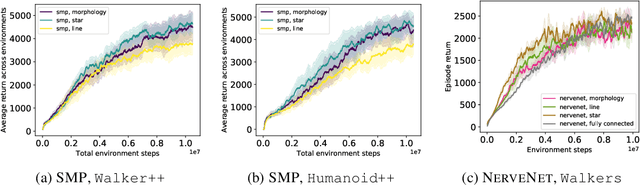
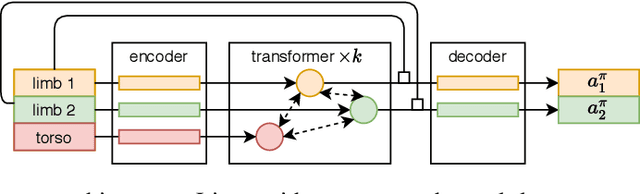
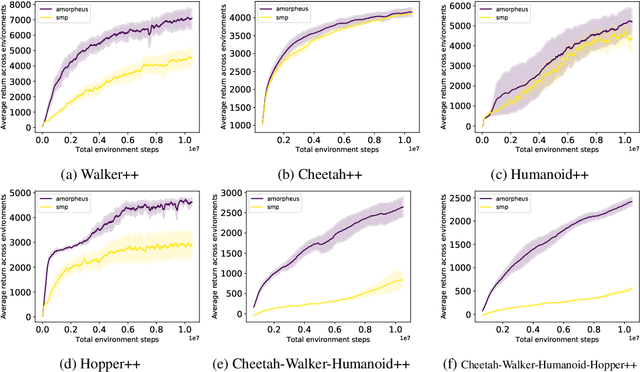
Multitask Reinforcement Learning is a promising way to obtain models with better performance, generalisation, data efficiency, and robustness. Most existing work is limited to compatible settings, where the state and action space dimensions are the same across tasks. Graph Neural Networks (GNN) are one way to address incompatible environments, because they can process graphs of arbitrary size. They also allow practitioners to inject biases encoded in the structure of the input graph. Existing work in graph-based continuous control uses the physical morphology of the agent to construct the input graph, i.e., encoding limb features as node labels and using edges to connect the nodes if their corresponded limbs are physically connected. In this work, we present a series of ablations on existing methods that show that morphological information encoded in the graph does not improve their performance. Motivated by the hypothesis that any benefits GNNs extract from the graph structure are outweighed by difficulties they create for message passing, we also propose Amorpheus, a transformer-based approach. Further results show that, while Amorpheus ignores the morphological information that GNNs encode, it nonetheless substantially outperforms GNN-based methods.