 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEdgeLoc: An Edge-IoT Framework for Robust Indoor Localization Using Capsule Networks
Paper and Code
Sep 12, 2020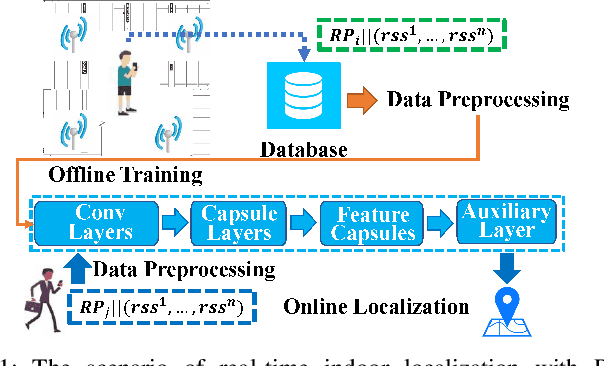
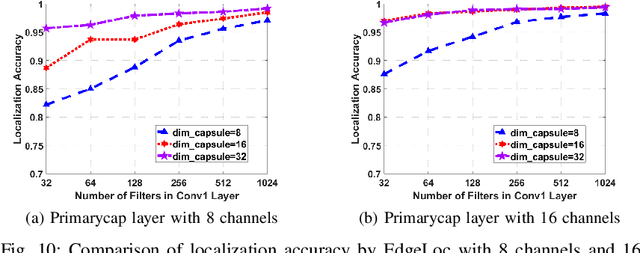
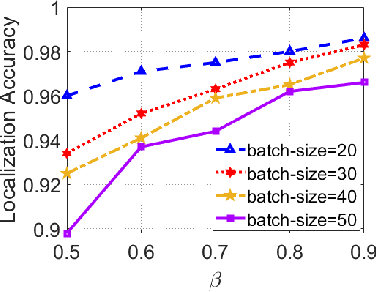
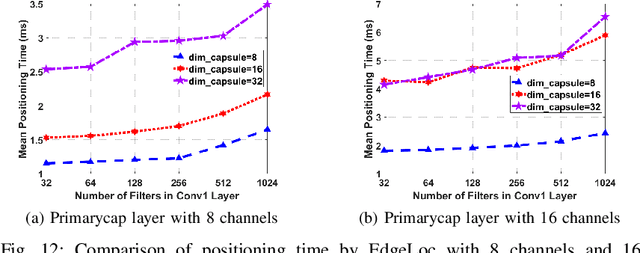
With the unprecedented demand for location-based services in indoor scenarios, wireless indoor localization has become essential for mobile users. While GPS is not available at indoor spaces, WiFi RSS fingerprinting has become popular with its ubiquitous accessibility. However, it is challenging to achieve robust and efficient indoor localization with two major challenges. First, the localization accuracy can be degraded by the random signal fluctuations, which would influence conventional localization algorithms that simply learn handcrafted features from raw fingerprint data. Second, mobile users are sensitive to the localization delay, but conventional indoor localization algorithms are computation-intensive and time-consuming. In this paper, we propose EdgeLoc, an edge-IoT framework for efficient and robust indoor localization using capsule networks. We develop a deep learning model with the CapsNet to efficiently extract hierarchical information from WiFi fingerprint data, thereby significantly improving the localization accuracy. Moreover, we implement an edge-computing prototype system to achieve a nearly real-time localization process, by enabling mobile users with the deep-learning model that has been well-trained by the edge server. We conduct a real-world field experimental study with over 33,600 data points and an extensive synthetic experiment with the open dataset, and the experimental results validate the effectiveness of EdgeLoc. The best trade-off of the EdgeLoc system achieves 98.5% localization accuracy within an average positioning time of only 2.31 ms in the field experiment.