 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHarnessing The Multi-Stability Of Kresling Origami For Reconfigurable Articulation In Soft Robotic Arms
Paper and Code
Aug 17, 2020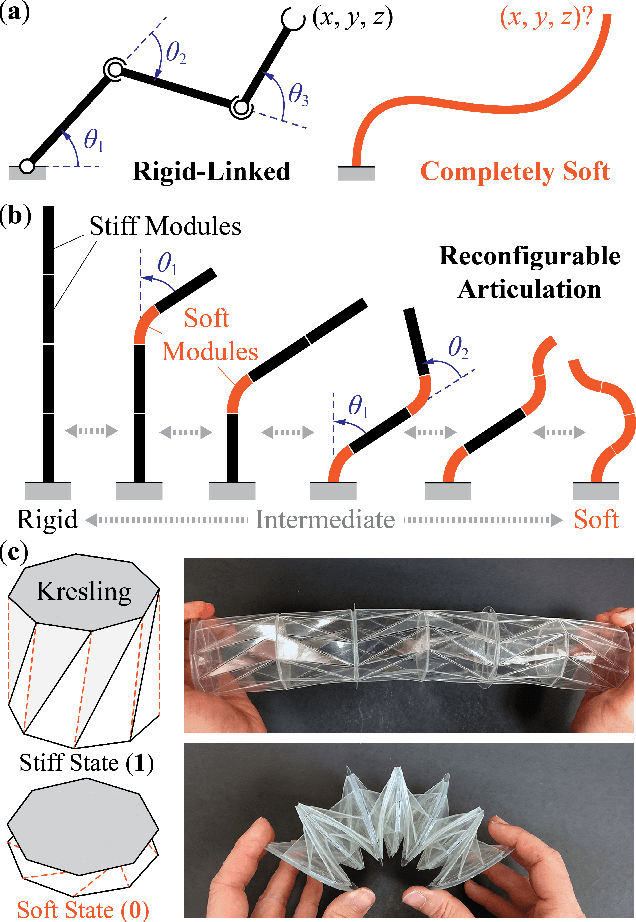
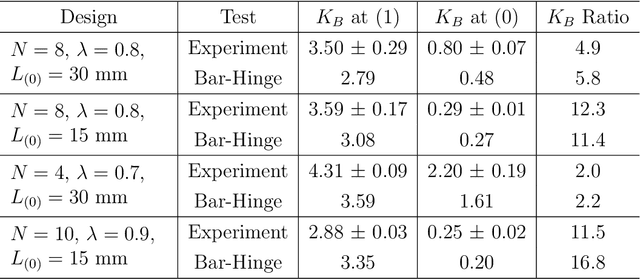
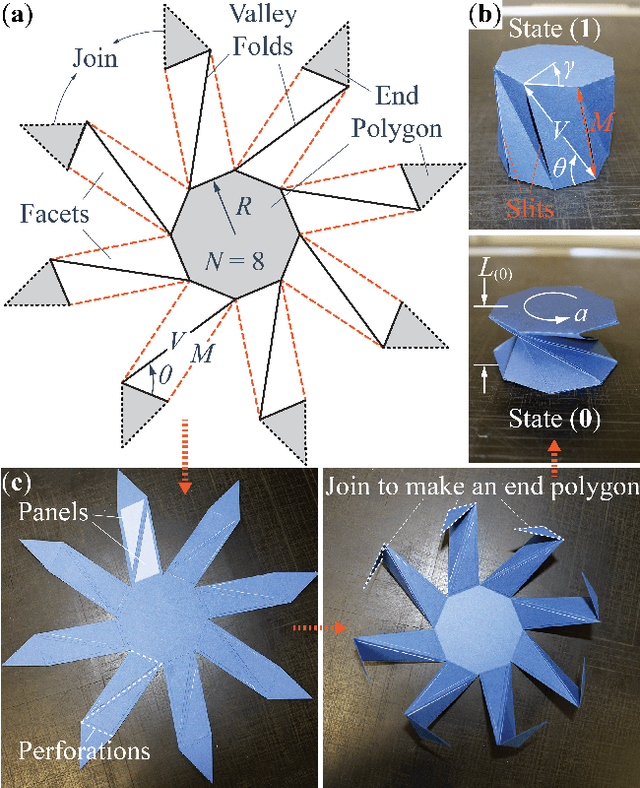
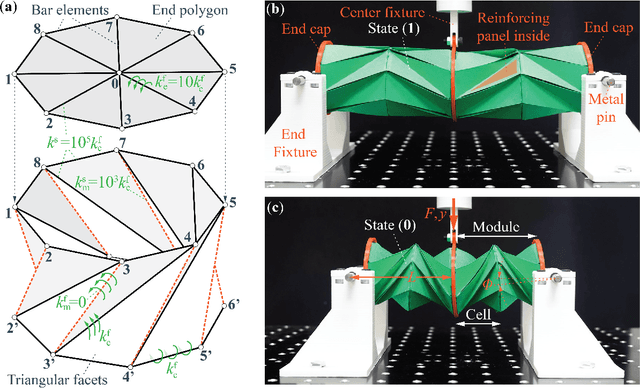
This study examines a biology-inspired approach of using reconfigurable articulation to reduce the control requirement for soft robotic arms. We construct a robotic arm by assembling Kresling origami modules that exhibit predictable bistability. Via switching between their two stable states, these origami modules can behave either like a flexible joint with low bending stiffness or like a stiff link with high stiffness, without requiring any continuous power supply. In this way, the robotic arm can exhibit pseudo-linkage kinematics with lower control requirements and improved motion accuracy. A unique advantage of using origami as the robotic arm skeleton is that its bending stiffness ratio between stable states is directly related to the underlying Kresling design. Therefore, we conduct extensive parametric analyses and experimental validations to identify the optimized Kresling pattern for articulation. The results indicate that a higher angle ratio, a smaller resting length at contracted stable state, and a large number of polygon sides can offer more significant and robust bending stiffness tuning. Based on this insight, we construct a proof-of-concept, tendon-driven robotic arm consisting of three modules, and show that it can exhibit the desired reconfigurable articulation behavior. Moreover, the deformations of this manipulator are consistent with kinematic model predictions, which validate the possibility of using simple controllers for such compliant robotic systems.