 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCompositional Networks Enable Systematic Generalization for Grounded Language Understanding
Paper and Code
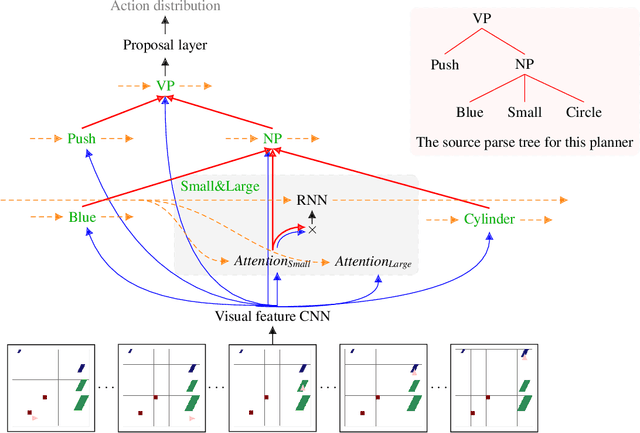
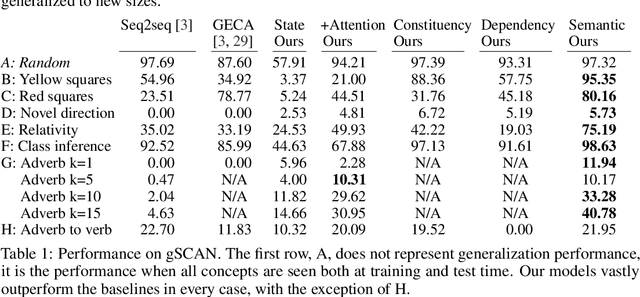
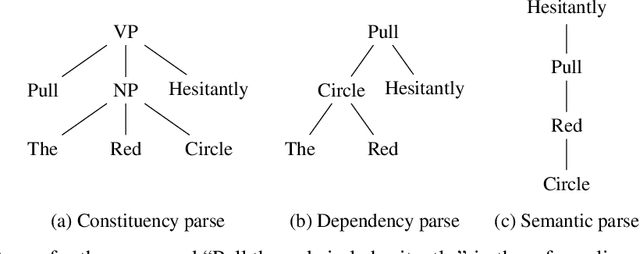
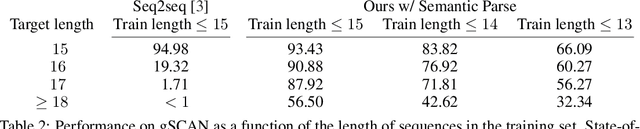
Humans are remarkably flexible when understanding new sentences that include combinations of concepts they have never encountered before. Recent work has shown that while deep networks can mimic some human language abilities when presented with novel sentences, systematic variation uncovers the limitations in the language-understanding abilities of neural networks. We demonstrate that these limitations can be overcome by addressing the generalization challenges in a recently-released dataset, gSCAN, which explicitly measures how well a robotic agent is able to interpret novel ideas grounded in vision, e.g., novel pairings of adjectives and nouns. The key principle we employ is compositionality: that the compositional structure of networks should reflect the compositional structure of the problem domain they address, while allowing all other parameters and properties to be learned end-to-end with weak supervision. We build a general-purpose mechanism that enables robots to generalize their language understanding to compositional domains. Crucially, our base network has the same state-of-the-art performance as prior work, 97% execution accuracy, while at the same time generalizing its knowledge when prior work does not; for example, achieving 95% accuracy on novel adjective-noun compositions where previous work has 55% average accuracy. Robust language understanding without dramatic failures and without corner causes is critical to building safe and fair robots; we demonstrate the significant role that compositionality can play in achieving that goal.