Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time and Autonomous Detection of Helipad for Landing Quad-Rotors by Visual Servoing
Paper and Code

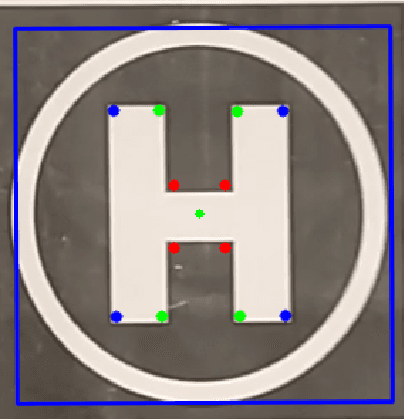
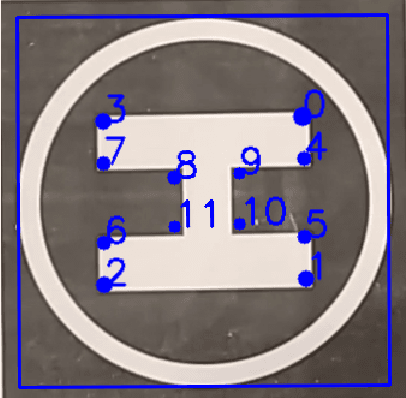
In this paper, we first present a method to autonomously detect helipads in real time. Our method does not rely on any machine-learning methods and as such is applicable in real-time on the computational capabilities of an average quad-rotor. After initial detection, we use image tracking methods to reduce the computational resource requirement further. Once the tracking starts our modified IBVS(Image-Based Visual Servoing) method starts publishing velocity to guide the quad-rotor onto the helipad. The modified IBVS scheme is designed for the four degrees-of-freedom of a quad-rotor and can land the quad-rotor in a specific orientation.
View paper on