 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge$S^3$Net: Semantic-Aware Self-supervised Depth Estimation with Monocular Videos and Synthetic Data
Paper and Code
Jul 28, 2020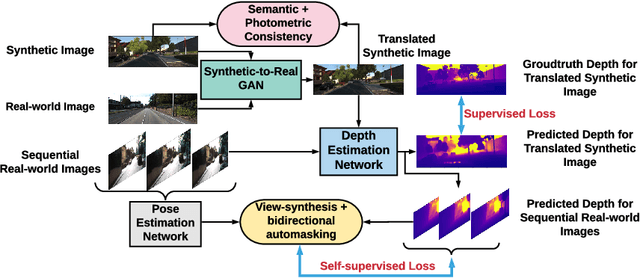

Solving depth estimation with monocular cameras enables the possibility of widespread use of cameras as low-cost depth estimation sensors in applications such as autonomous driving and robotics. However, learning such a scalable depth estimation model would require a lot of labeled data which is expensive to collect. There are two popular existing approaches which do not require annotated depth maps: (i) using labeled synthetic and unlabeled real data in an adversarial framework to predict more accurate depth, and (ii) unsupervised models which exploit geometric structure across space and time in monocular video frames. Ideally, we would like to leverage features provided by both approaches as they complement each other; however, existing methods do not adequately exploit these additive benefits. We present $S^3$Net, a self-supervised framework which combines these complementary features: we use synthetic and real-world images for training while exploiting geometric, temporal, as well as semantic constraints. Our novel consolidated architecture provides a new state-of-the-art in self-supervised depth estimation using monocular videos. We present a unique way to train this self-supervised framework, and achieve (i) more than $15\%$ improvement over previous synthetic supervised approaches that use domain adaptation and (ii) more than $10\%$ improvement over previous self-supervised approaches which exploit geometric constraints from the real data.