 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContact-Implicit Trajectory Optimization using an Analytically Solvable Contact Model for Locomotion on Variable Ground
Paper and Code
Jul 22, 2020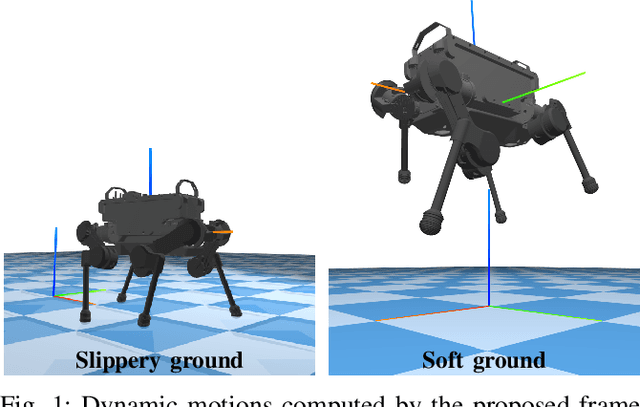
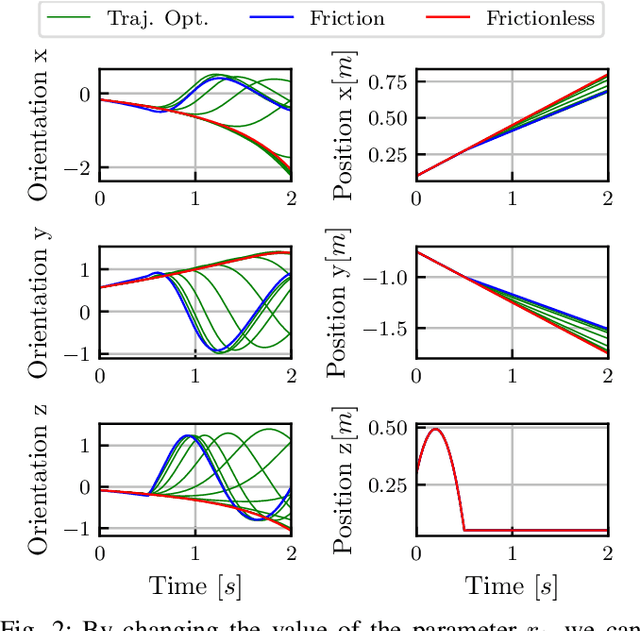
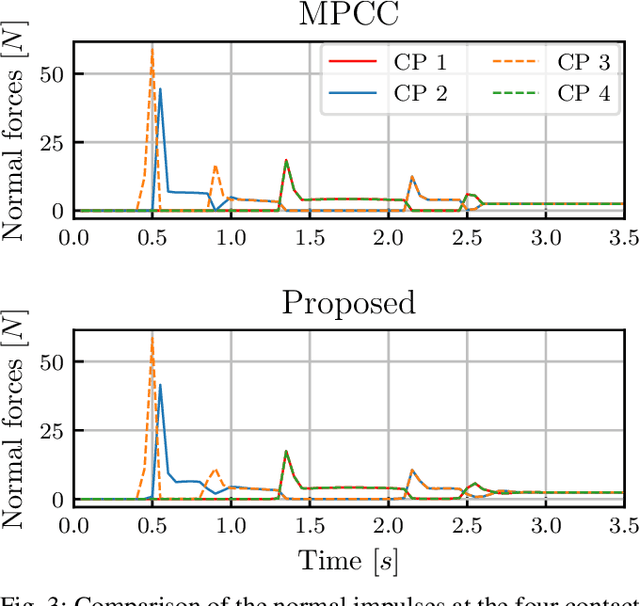
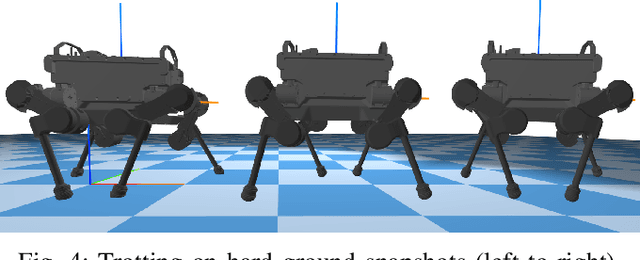
This paper presents a novel contact-implicit trajectory optimization method using an analytically solvable contact model to enable planning of interactions with hard, soft, and slippery environments. Specifically, we propose a novel contact model that can be computed in closed-form, satisfies friction cone constraints and can be embedded into direct trajectory optimization frameworks without complementarity constraints. The closed-form solution decouples the computation of the contact forces from other actuation forces and this property is used to formulate a minimal direct optimization problem expressed with configuration variables only. Our simulation study demonstrates the advantages over the rigid contact model and a trajectory optimization approach based on complementarity constraints. The proposed model enables physics-based optimization for a wide range of interactions with hard, slippery, and soft grounds in a unified manner expressed by two parameters only. By computing trotting and jumping motions for a quadruped robot, the proposed optimization demonstrates the versatility for multi-contact motion planning on surfaces with different physical properties.