 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNaviGAN: A Generative Approach for Socially Compliant Navigation
Paper and Code
Jul 10, 2020
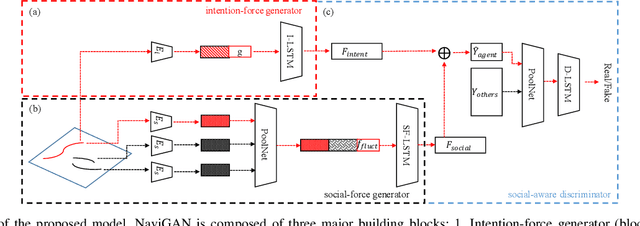
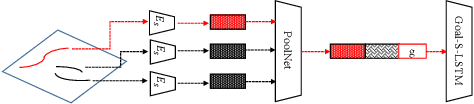
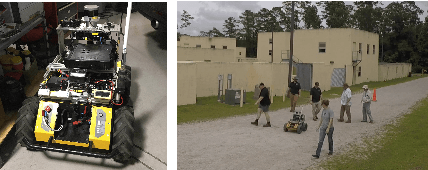
Robots navigating in human crowds need to optimize their paths not only for their task performance but also for their compliance to social norms. One of the key challenges in this context is the lack of standard metrics for evaluating and optimizing a socially compliant behavior. Existing works in social navigation can be grouped according to the differences in their optimization objectives. For instance, the reinforcement learning approaches tend to optimize on the \textit{comfort} aspect of the socially compliant navigation, whereas the inverse reinforcement learning approaches are designed to achieve \textit{natural} behavior. In this paper, we propose NaviGAN, a generative navigation algorithm that jointly optimizes both of the \textit{comfort} and \textit{naturalness} aspects. Our approach is designed as an adversarial training framework that can learn to generate a navigation path that is both optimized for achieving a goal and for complying with latent social rules. A set of experiments has been carried out on multiple datasets to demonstrate the strengths of the proposed approach quantitatively. We also perform extensive experiments using a physical robot in a real-world environment to qualitatively evaluate the trained social navigation behavior. The video recordings of the robot experiments can be found in the link: https://youtu.be/61blDymjCpw.