Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApproximate Time-Optimal Trajectories for Damped Double Integrator in 2D Obstacle Environments under Bounded Inputs
Paper and Code
Jul 13, 2020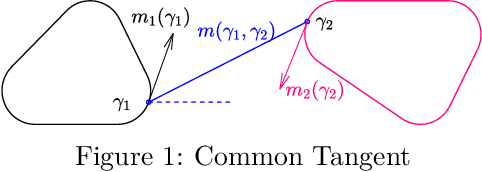
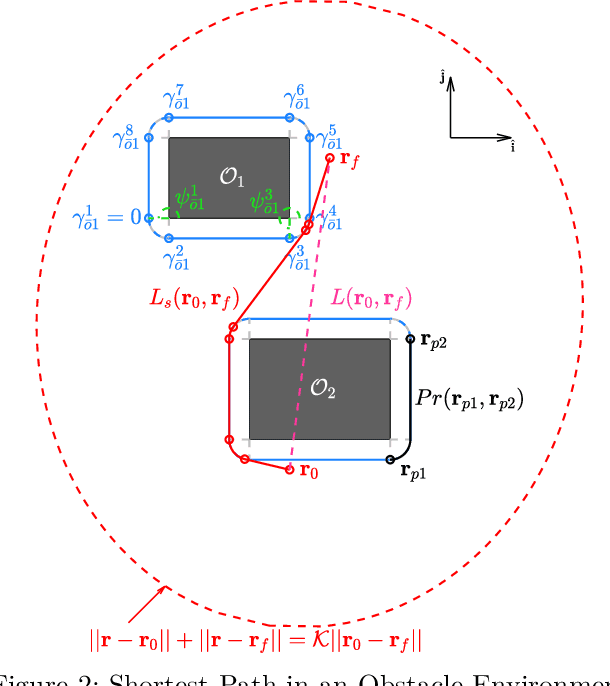
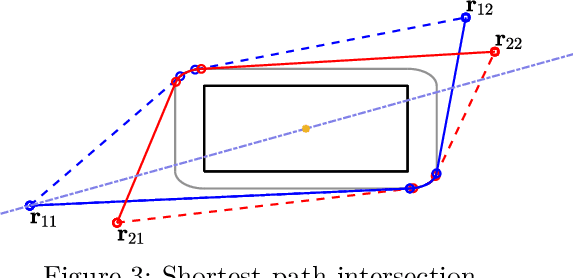
This article provides extensions to existing path-velocity decomposition based time optimal trajectory planning algorithm \cite{kant1986toward} to scenarios in which agents move in 2D obstacle environment under double integrator dynamics with drag term (damped double integrator). Particularly, we extend the idea of a tangent graph \cite{liu1992path} to $\calC^1$-Tangent graph to find continuously differentiable ($\calC^1$) shortest path between any two points. $\calC^1$-Tangent graph has a continuously differentiable ($\calC^1$) path between any two nodes. We also provide analytical expressions for a near time-optimal velocity profile for an agent moving on these shortest paths under the damped double integrator with bounded acceleration.
* A supplementary article, 6 pages, 3 figures
View paper on