 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVehicle Re-ID for Surround-view Camera System
Paper and Code
Jun 30, 2020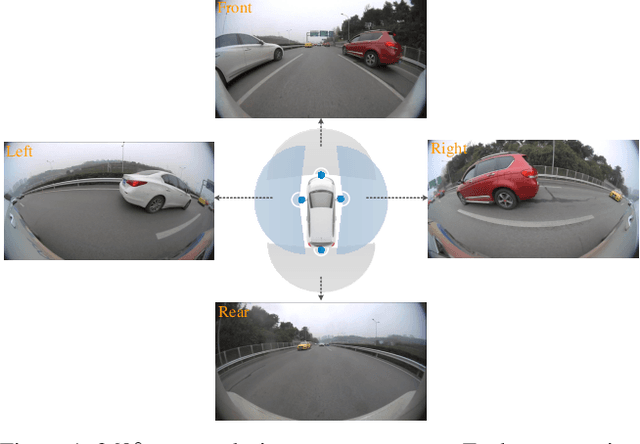
The vehicle re-identification (ReID) plays a critical role in the perception system of autonomous driving, which attracts more and more attention in recent years. However, to our best knowledge, there is no existing complete solution for the surround-view system mounted on the vehicle. In this paper, we argue two main challenges in above scenario: i) In single camera view, it is difficult to recognize the same vehicle from the past image frames due to the fisheye distortion, occlusion, truncation, etc. ii) In multi-camera view, the appearance of the same vehicle varies greatly from different camera's viewpoints. Thus, we present an integral vehicle Re-ID solution to address these problems. Specifically, we propose a novel quality evaluation mechanism to balance the effect of tracking box's drift and target's consistency. Besides, we take advantage of the Re-ID network based on attention mechanism, then combined with a spatial constraint strategy to further boost the performance between different cameras. The experiments demonstrate that our solution achieves state-of-the-art accuracy while being real-time in practice. Besides, we will release the code and annotated fisheye dataset for the benefit of community.