 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShape from Projections via Differentiable Forward Projector
Paper and Code
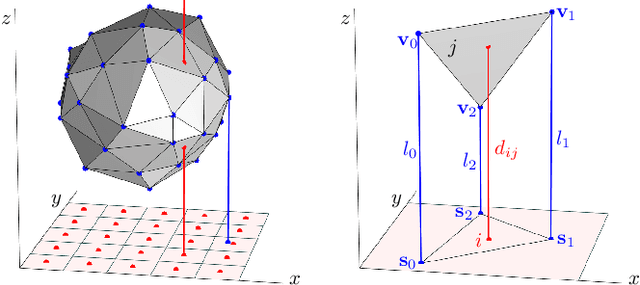

In tomography, forward projection of 3D meshes has been mostly studied to simulate data acquisition. However, such works did not consider an inverse process of estimating shapes from projections. In this paper, we propose a differentiable forward projector for 3D meshes, to bridge the gap between the forward model for 3D surfaces and optimization. We view the forward projection as a rendering process, and make it differentiable by extending a recent work in differentiable rasterization. We use the proposed forward projector to reconstruct 3D shapes directly from projections. Experimental results for single-object problems show that our method outperforms the traditional voxel-based methods on noisy simulated data. We also apply our method on real data from electron tomography to estimate the shapes of some nanoparticles.