 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Robust Sensor Fusion in Visual Perception
Paper and Code
Jun 23, 2020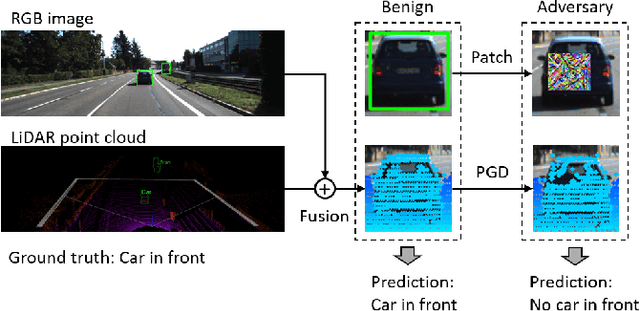
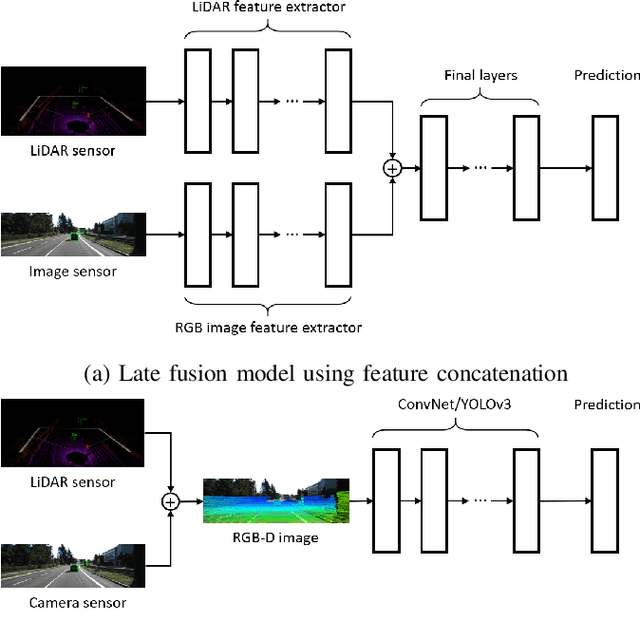
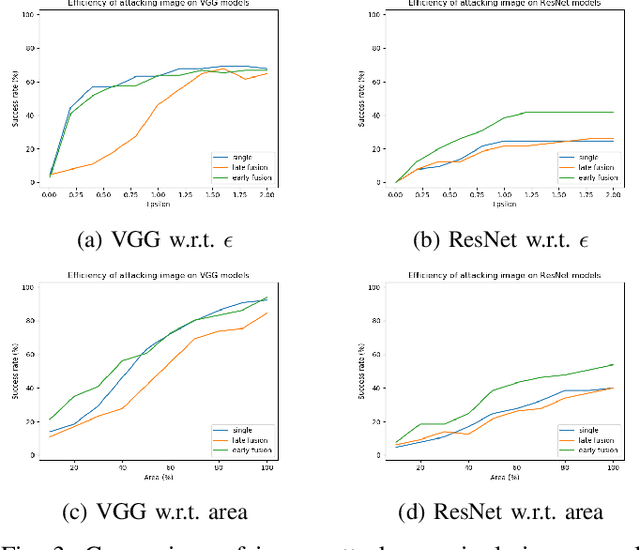
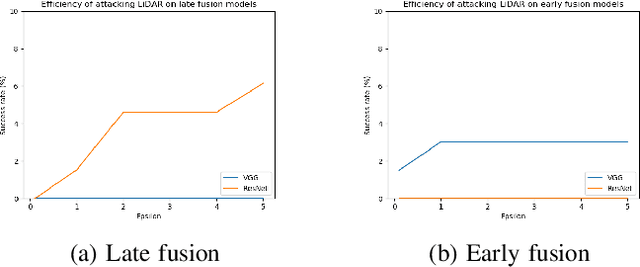
We study the problem of robust sensor fusion in visual perception, especially under the autonomous driving settings. We evaluate the robustness of RGB camera and LiDAR sensor fusion for binary classification and object detection. In this work, we are interested in the behavior of different fusion methods under adversarial attacks on different sensors. We first train both classification and detection models with early fusion and late fusion, then apply different combinations of adversarial attacks on both sensor inputs for evaluation. We also study the effectiveness of adversarial attacks with varying budgets. Experiment results show that while sensor fusion models are generally vulnerable to adversarial attacks, late fusion method is more robust than early fusion. The results also provide insights on further obtaining robust sensor fusion models.