Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Information-Theoretic Approach for Path Planning in Agents with Computational Constraints
Paper and Code
May 19, 2020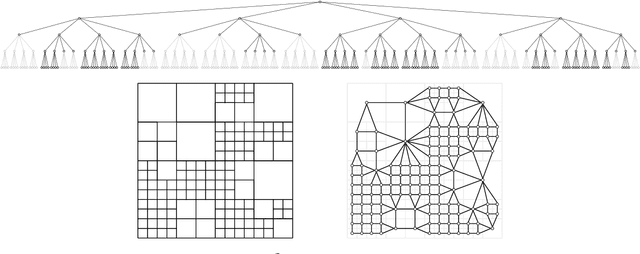
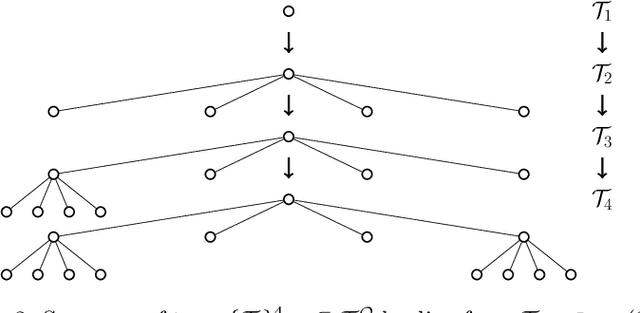
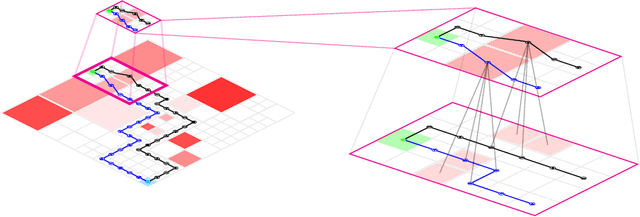
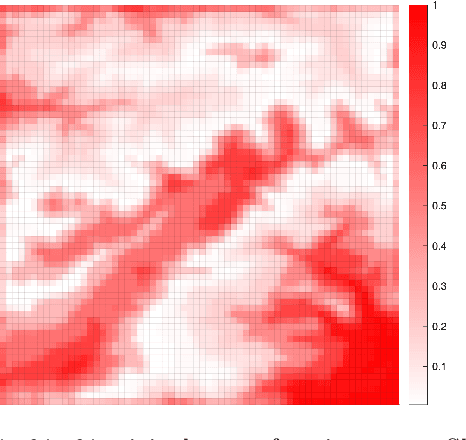
In this paper, we develop a framework for path-planning on abstractions that are not provided to the system a-priori but instead emerge as a function of the agent's available computational resources. We show how a path-planning problem in an environment can be systematically approximated by solving a sequence of easier to solve problems on abstractions of the original space. The properties of the problem are analyzed, and supporting theoretical results presented and discussed. A numerical example is presented to show the utility of the approach and to corroborate the theoretical findings. We conclude by providing a discussion of the results and their interpretation relating to anytime algorithms and bounded rationality.
View paper on