Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRealizability of Planar Point Embeddings from Angle Measurements
Paper and Code

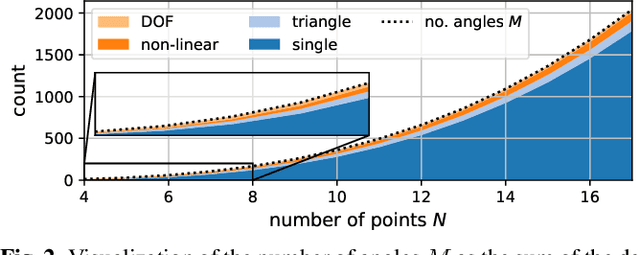
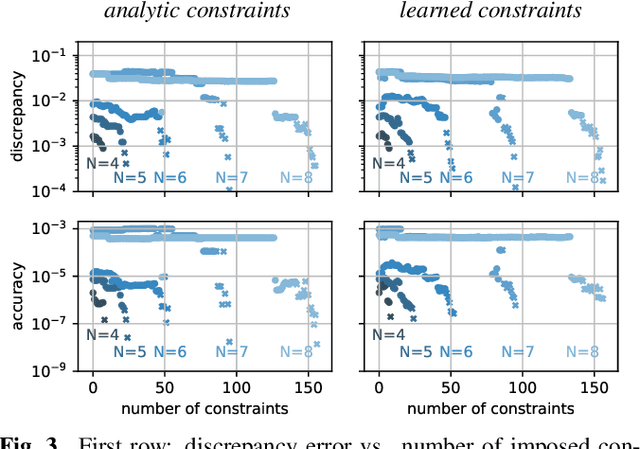
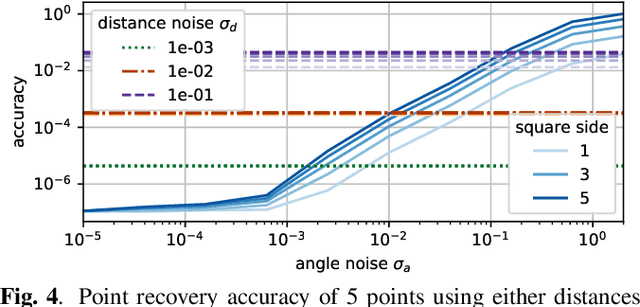
Localization of a set of nodes is an important and a thoroughly researched problem in robotics and sensor networks. This paper is concerned with the theory of localization from inner-angle measurements. We focus on the challenging case where no anchor locations are known. Inspired by Euclidean distance matrices, we investigate when a set of inner angles corresponds to a realizable point set. In particular, we find linear and non-linear constraints that are provably necessary, and we conjecture also sufficient for characterizing realizable angle sets. We confirm this in extensive numerical simulations, and we illustrate the use of these constraints for denoising angle measurements along with the reconstruction of a valid point set.
* IEEE International Conference on Acoustics, Speech, and Signal
Processing (ICASSP 2020)
View paper on