 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnomaly Detection in Connected and Automated Vehicles using an Augmented State Formulation
Paper and Code
Apr 18, 2020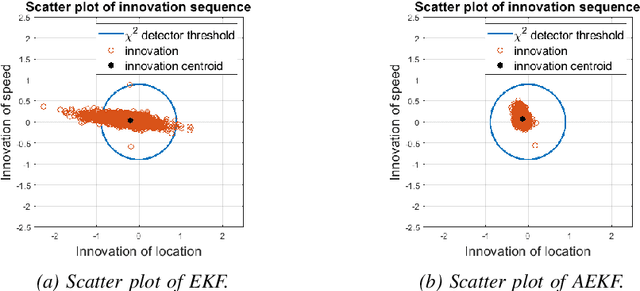
In this paper we propose a novel observer-based method for anomaly detection in connected and automated vehicles (CAVs). The proposed method utilizes an augmented extended Kalman filter (AEKF) to smooth sensor readings of a CAV based on a nonlinear car-following motion model with time delay, where the leading vehicle's trajectory is used by the subject vehicle to detect sensor anomalies. We use the classic $\chi^2$ fault detector in conjunction with the proposed AEKF for anomaly detection. To make the proposed model more suitable for real-world applications, we consider a stochastic communication time delay in the car-following model. Our experiments conducted on real-world connected vehicle data indicate that the AEKF with $\chi^2$-detector can achieve a high anomaly detection performance.