 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeatureNMS: Non-Maximum Suppression by Learning Feature Embeddings
Paper and Code
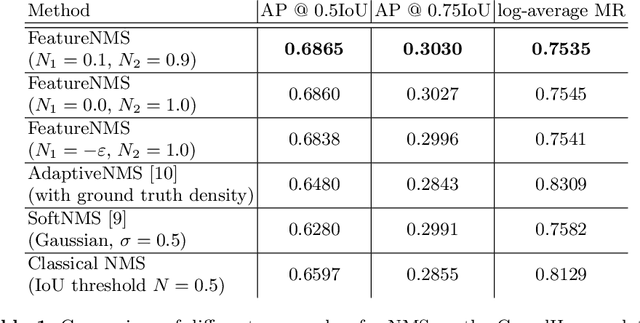
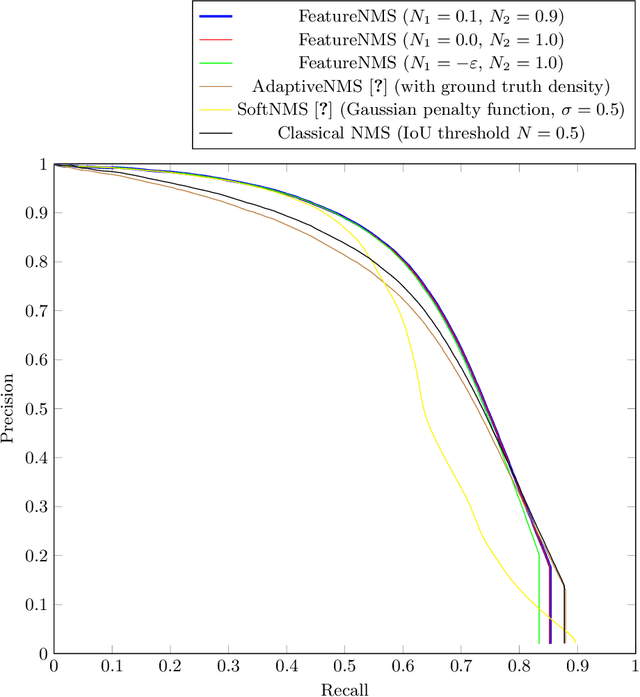

Most state of the art object detectors output multiple detections per object. The duplicates are removed in a post-processing step called Non-Maximum Suppression. Classical Non-Maximum Suppression has shortcomings in scenes that contain objects with high overlap: The idea of this heuristic is that a high bounding box overlap corresponds to a high probability of having a duplicate. We propose FeatureNMS to solve this problem. FeatureNMS recognizes duplicates not only based on the intersection over union between bounding boxes, but also based on the difference of feature vectors. These feature vectors can encode more information like visual appearance. Our approach outperforms classical NMS and derived approaches and achieves state of the art performance.