 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSim2Real2Sim: Bridging the Gap Between Simulation and Real-World in Flexible Object Manipulation
Paper and Code
Feb 10, 2020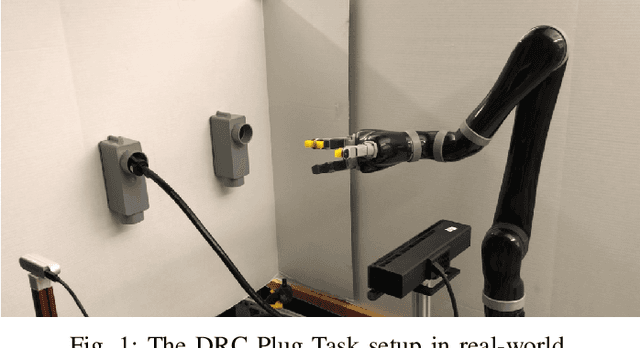
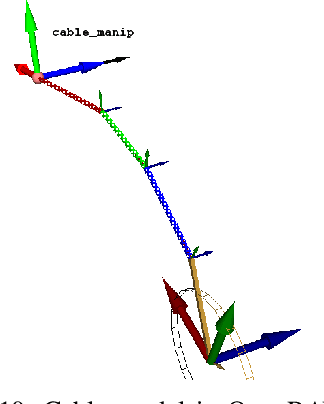
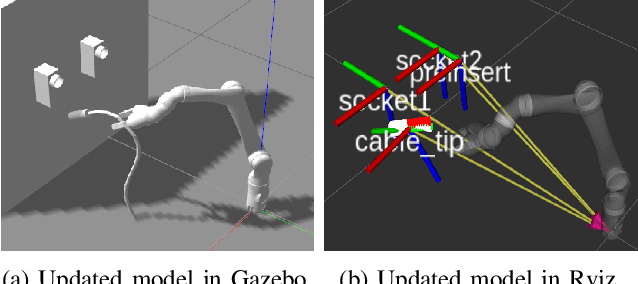
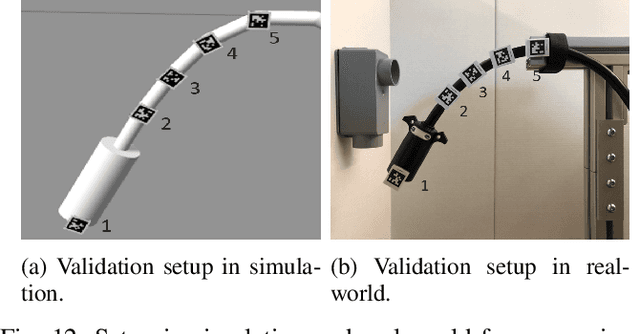
This paper addresses a new strategy called Simulation-to-Real-to-Simulation (Sim2Real2Sim) to bridge the gap between simulation and real-world, and automate a flexible object manipulation task. This strategy consists of three steps: (1) using the rough environment with the estimated models to develop the methods to complete the manipulation task in the simulation; (2) applying the methods from simulation to real-world and comparing their performance; (3) updating the models and methods in simulation based on the differences between the real world and the simulation. The Plug Task from the 2015 DARPA Robotics Challenge Finals is chosen to evaluate our Sim2Real2Sim strategy. A new identification approach for building the model of the linear flexible objects is derived from real-world to simulation. The automation of the DRC plug task in both simulation and real-world proves the success of the Sim2Real2Sim strategy. Numerical experiments are implemented to validate the simulated model.