 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKernel-Guided Training of Implicit Generative Models with Stability Guarantees
Paper and Code
Nov 03, 2019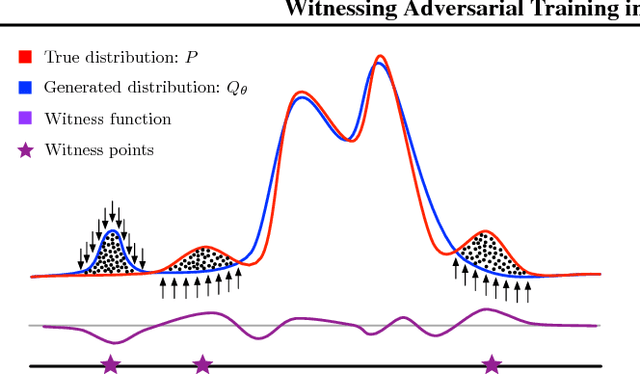
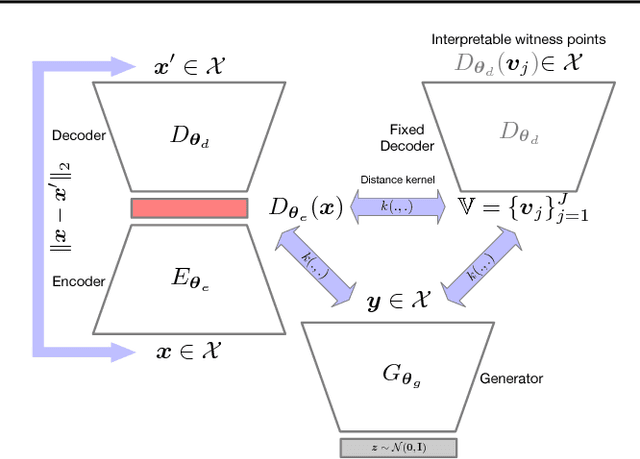
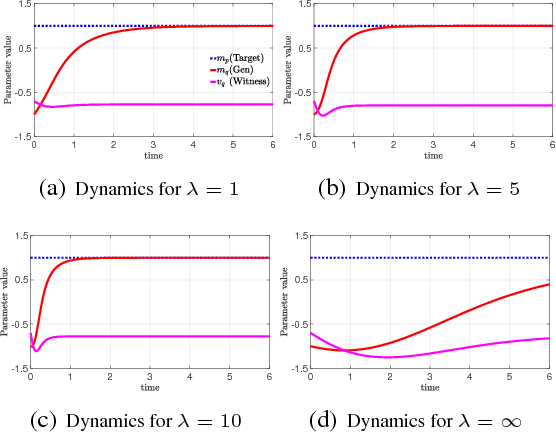
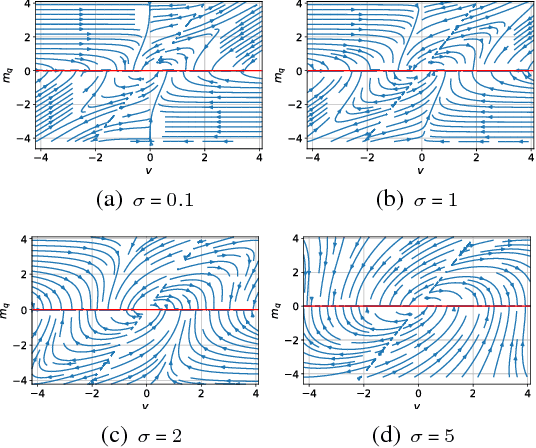
Modern implicit generative models such as generative adversarial networks (GANs) are generally known to suffer from issues such as instability, uninterpretability, and difficulty in assessing their performance. If we see these implicit models as dynamical systems, some of these issues are caused by being unable to control their behavior in a meaningful way during the course of training. In this work, we propose a theoretically grounded method to guide the training trajectories of GANs by augmenting the GAN loss function with a kernel-based regularization term that controls local and global discrepancies between the model and true distributions. This control signal allows us to inject prior knowledge into the model. We provide theoretical guarantees on the stability of the resulting dynamical system and demonstrate different aspects of it via a wide range of experiments.