 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImprovements to Target-Based 3D LiDAR to Camera Calibration
Paper and Code
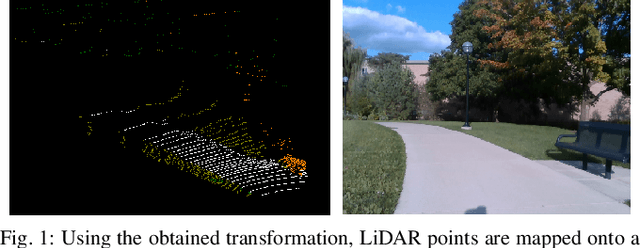

The homogeneous transformation between a LiDAR and monocular camera is required for sensor fusion tasks, such as SLAM. While determining such a transformation is not considered glamorous in any sense of the word, it is nonetheless crucial for many modern autonomous systems. Indeed, an error of a few degrees in rotation or a few percent in translation can lead to 20 cm translation errors at a distance of 5 m when overlaying a LiDAR image on a camera image. The biggest impediments to determining the transformation accurately are the relative sparsity of LiDAR point clouds and systematic errors in their distance measurements. This paper proposes (1) the use of targets of known dimension and geometry to ameliorate target pose estimation in face of the quantization and systematic errors inherent in a LiDAR image of a target, and (2) a fitting method for the LiDAR to monocular camera transformation that fundamentally assumes the camera image data is the most accurate information in one's possession.