 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePath Planning Tolerant to Degraded Locomotion Conditions
Paper and Code
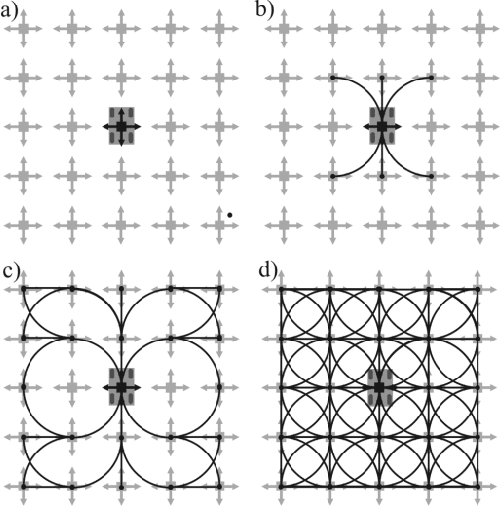
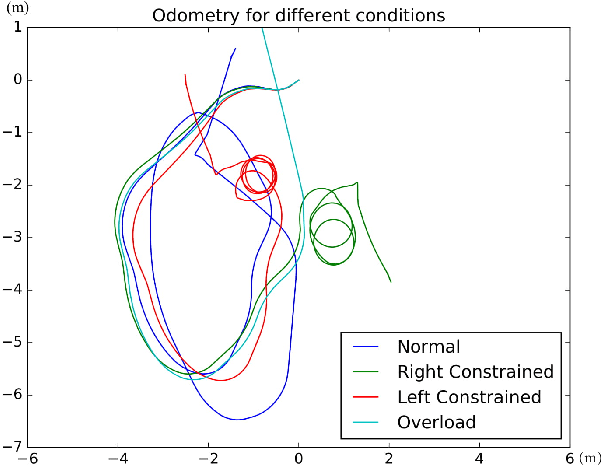
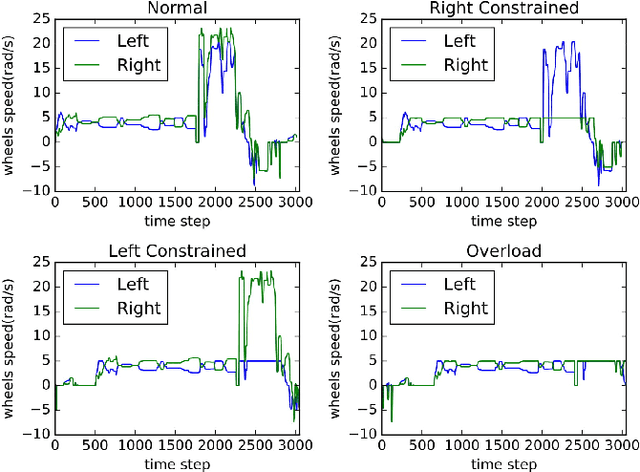
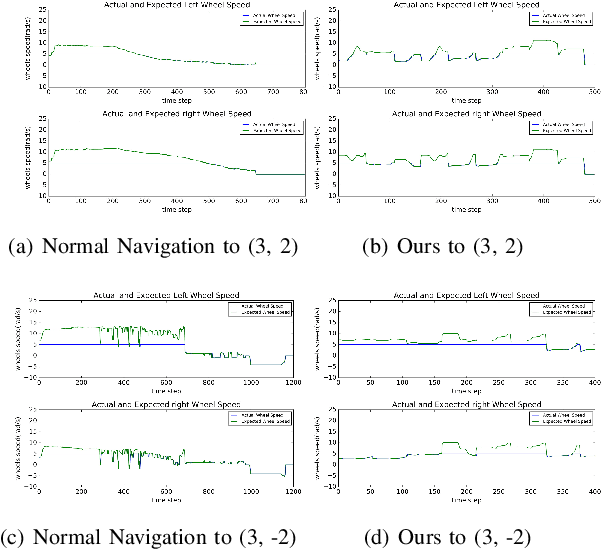
Mobile robots, especially those driving outdoors and in unstructured terrain, sometimes suffer from failures and errors in locomotion, like unevenly pressurized or flat tires, loose axes or de-tracked tracks. Those are errors that go unnoticed by the odometry of the robot. Other factors that influence the locomotion performance of the robot, like the weight and distribution of the payload, the terrain over which the robot is driving or the battery charge could not be compensated for by the PID speed or position controller of the robot, because of the physical limits of the system. Traditional planning systems are oblivious to those problems and may thus plan unfeasible trajectories. Also, the path following modules oblivious to those problems will generate sub-optimal motion patterns, if they can get to the goal at all. In this paper, we present an adaptive path planning algorithm that is tolerant to such degraded locomotion conditions. We do this by constantly observing the executed motions of the robot via simultaneously localization and mapping (SLAM). From the executed path and the given motion commands, we constantly on the fly collect and cluster motion primitives (MP), which are in turn used for planning. Therefore the robot can automatically detect and adapt to different locomotion conditions and reflect those in the planned paths.