Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConfiguration-Space Flipper Planning on 3D Terrain
Paper and Code
Sep 17, 2019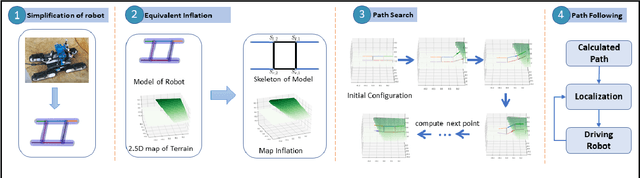
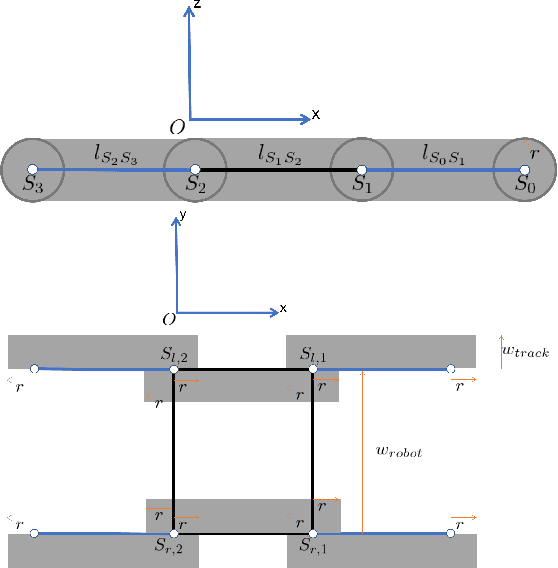
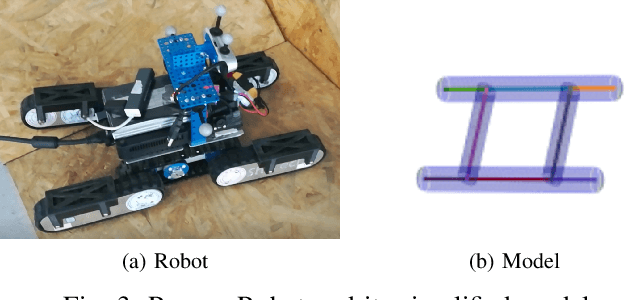
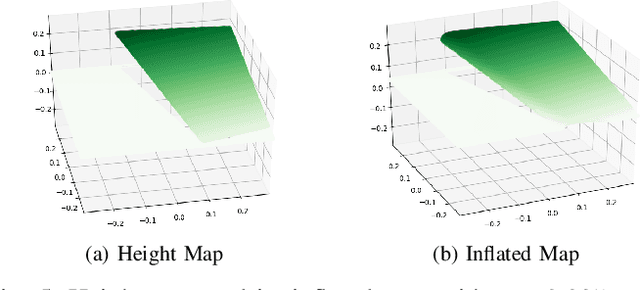
Autonomous run is always a goal in the field of rescue robot and the utilization of flipper will strongly improve the mobility and safety of robot. In this work, we simplify the rescue robot as a skeleton on inflated terrain. Its morphology can be represented by configuration of several parameters. Based on our previous paper, we further configure four flippers individually. The proposed flipper planning is of a mobile movement on 3D terrain with 2.5D maps. The experiment shows that our method can well tackle various terrain and have high efficiency on manipulating the flippers.
View paper on