 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeuromodulated Patience for Robot and Self-Driving Vehicle Navigation
Paper and Code
Sep 14, 2019

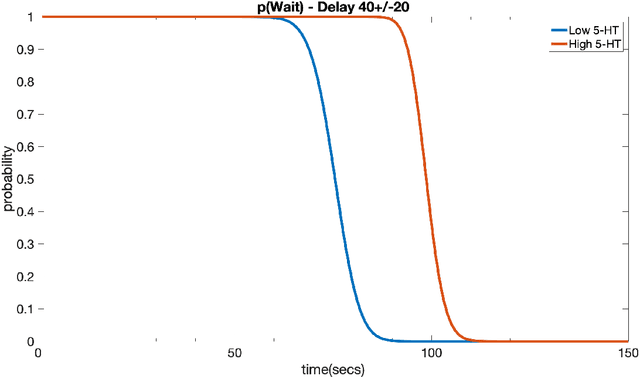
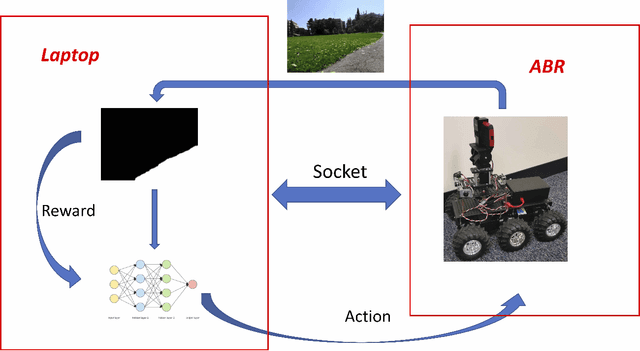
Robots and self-driving vehicles face a number of challenges when navigating through real environments. Successful navigation in dynamic environments requires prioritizing subtasks and monitoring resources. Animals are under similar constraints. It has been shown that the neuromodulator serotonin regulates impulsiveness and patience in animals. In the present paper, we take inspiration from the serotonergic system and apply it to the task of robot navigation. In a set of outdoor experiments, we show how changing the level of patience can affect the amount of time the robot will spend searching for a desired location. To navigate GPS compromised environments, we introduce a deep reinforcement learning paradigm in which the robot learns to follow sidewalks. This may further regulate a tradeoff between a smooth long route and a rough shorter route. Using patience as a parameter may be beneficial for autonomous systems under time pressure.