 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRRT2.0 for Fast and Optimal Kinodynamic Sampling-Based Motion Planning
Paper and Code
Sep 13, 2019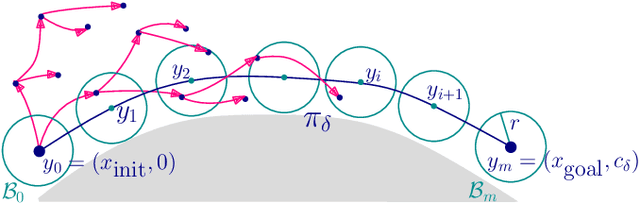
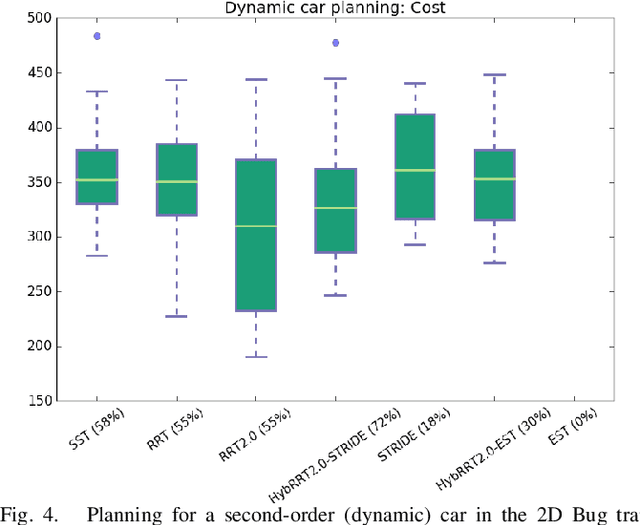
We present RRT2.0: a simple yet efficient tree-based planner for asymptotically-optimal motion planning with kinodynamic constraints. RRT2.0 uses forward propagation and does not rely on the availability of a two-point boundary-value solver. The latter is a limiting requirement for some kinodynamic planners that are asymptotically optimal. The proposed approach improves upon a technique by Hauser and Zhou (2016), who explore an augmented state space with an additional coordinate, which endows every point in space with its cost-to-come value. Importantly, our optimality proofs require a milder and easily-verifiable set of assumptions on the problem and system: Lipschitz-continuity of the cost function and the dynamics. In particular, we prove that for any system satisfying those assumptions, any trajectory having a piecewise-constant control function and positive clearance from obstacles can be approximated arbitrarily well by a trajectory found by RRT2.0. We provide experimental results demonstrating on a couple of robot models with kinodynamic constraints that RRT2.0 outperforms the existing alternatives in practice.