 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Precise Robotic Grasping by Probabilistic Post-grasp Displacement Estimation
Paper and Code
Sep 04, 2019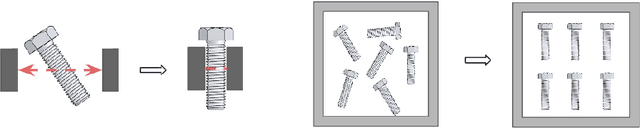
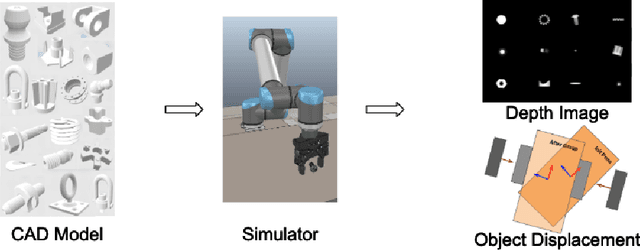
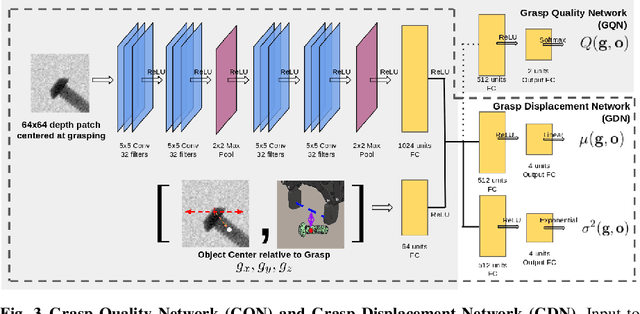
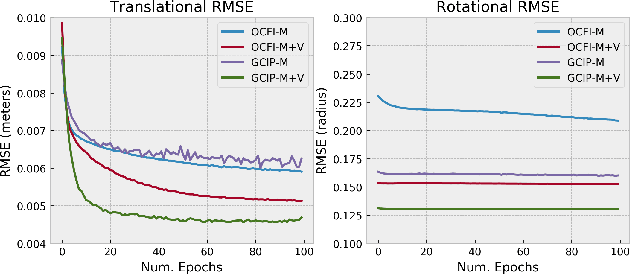
Precise robotic grasping is important for many industrial applications, such as assembly and palletizing, where the location of the object needs to be controlled and known. However, achieving precise grasps is challenging due to noise in sensing and control, as well as unknown object properties. We propose a method to plan robotic grasps that are both robust and precise by training two convolutional neural networks - one to predict the robustness of a grasp and another to predict a distribution of post-grasp object displacements. Our networks are trained with depth images in simulation on a dataset of over 1000 industrial parts and were successfully deployed on a real robot without having to be further fine-tuned. The proposed displacement estimator achieves a mean prediction errors of 0.68cm and 3.42deg on novel objects in real world experiments.