Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinuous Value Iteration (CVI) Reinforcement Learning and Imaginary Experience Replay (IER) for learning multi-goal, continuous action and state space controllers
Paper and Code
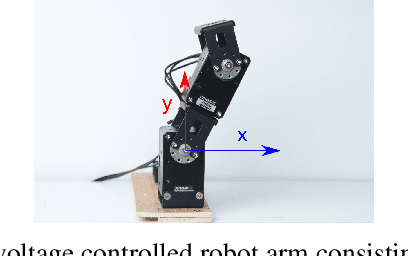
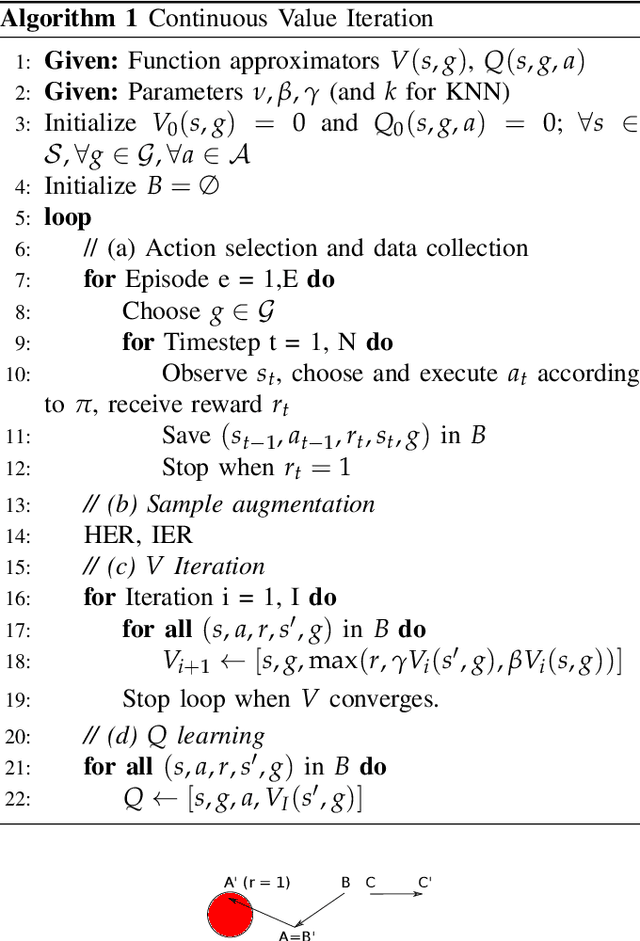
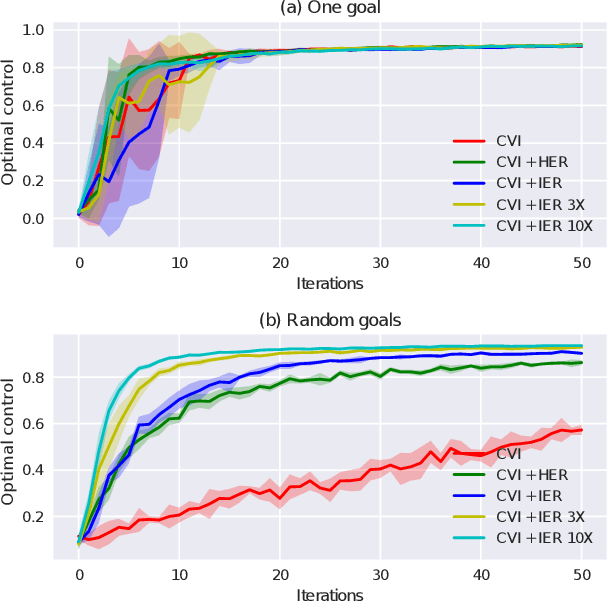
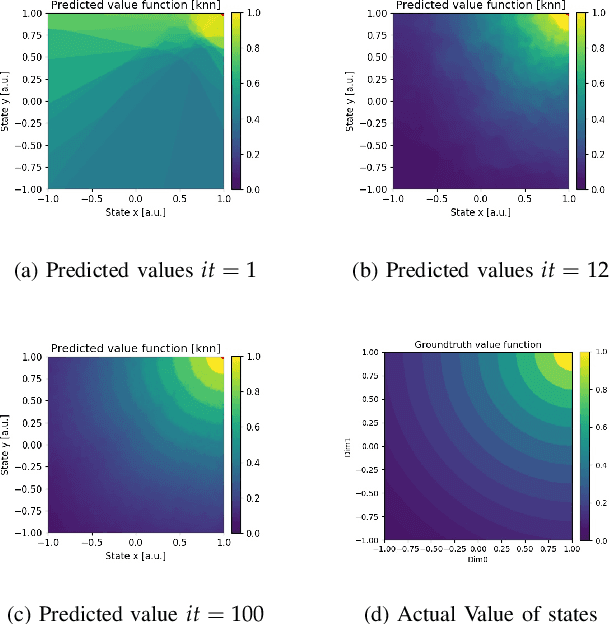
This paper presents a novel model-free Reinforcement Learning algorithm for learning behavior in continuous action, state, and goal spaces. The algorithm approximates optimal value functions using non-parametric estimators. It is able to efficiently learn to reach multiple arbitrary goals in deterministic and nondeterministic environments. To improve generalization in the goal space, we propose a novel sample augmentation technique. Using these methods, robots learn faster and overall better controllers. We benchmark the proposed algorithms using simulation and a real-world voltage controlled robot that learns to maneuver in a non-observable Cartesian task space.
* Published in 2019 International Conference on Robotics and Automation
(ICRA) 20-24 May 2019
View paper on