 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistill Knowledge from NRSfM for Weakly Supervised 3D Pose Learning
Paper and Code
Aug 18, 2019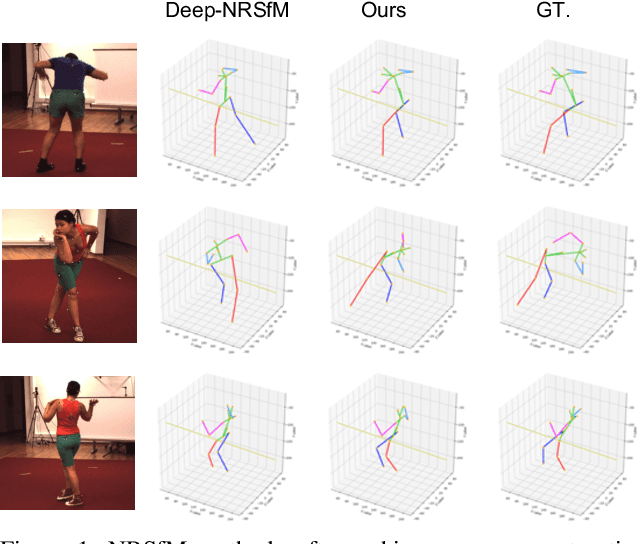

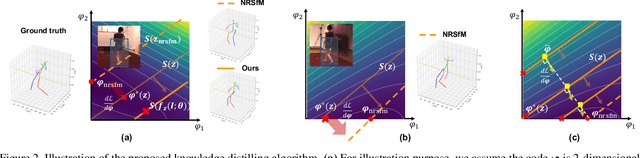

We propose to learn a 3D pose estimator by distilling knowledge from Non-Rigid Structure from Motion (NRSfM). Our method uses solely 2D landmark annotations. No 3D data, multi-view/temporal footage, or object specific prior is required. This alleviates the data bottleneck, which is one of the major concern for supervised methods. The challenge for using NRSfM as teacher is that they often make poor depth reconstruction when the 2D projections have strong ambiguity. Directly using those wrong depth as hard target would negatively impact the student. Instead, we propose a novel loss that ties depth prediction to the cost function used in NRSfM. This gives the student pose estimator freedom to reduce depth error by associating with image features. Validated on H3.6M dataset, our learned 3D pose estimation network achieves more accurate reconstruction compared to NRSfM methods. It also outperforms other weakly supervised methods, in spite of using significantly less supervision.