Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVehicular Multi-object Tracking with Persistent Detector Failures
Paper and Code
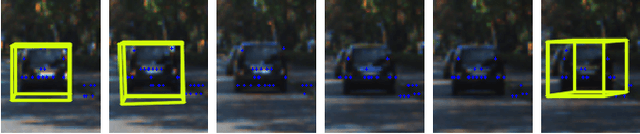


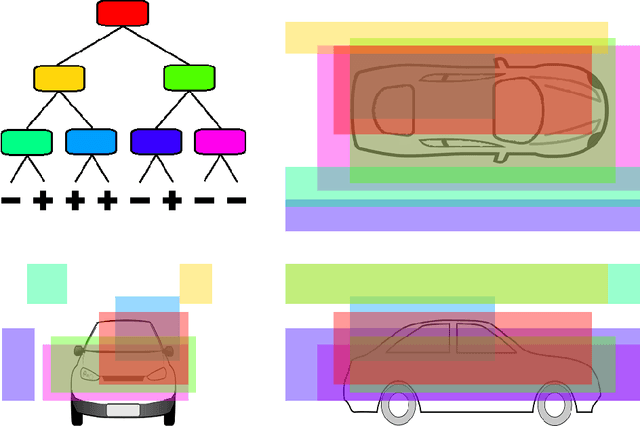
Autonomous vehicles often perceive the environment by feeding sensor data to a learned detector algorithm, then feeding detections to a multi-object tracker that models object motions over time. Probabilistic models of multi-object trackers typically assume that errors in the detector algorithm occur randomly over time. We instead assume that undetected objects and false detections will persist in certain conditions, and modify the tracking framework to account for them. The modifications are tested with a novel lidar-based vehicle detector, and shown to enable real-time detection and tracking without specialized computing hardware.
View paper on