 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBilevel Integrative Optimization for Ill-posed Inverse Problems
Paper and Code
Jul 06, 2019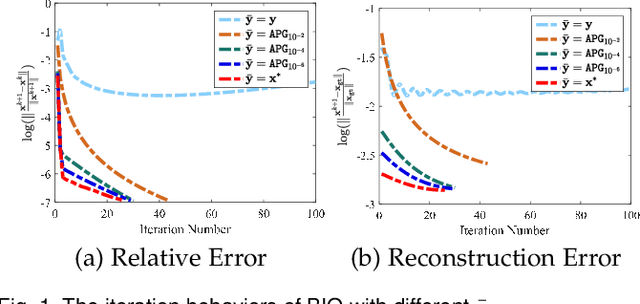
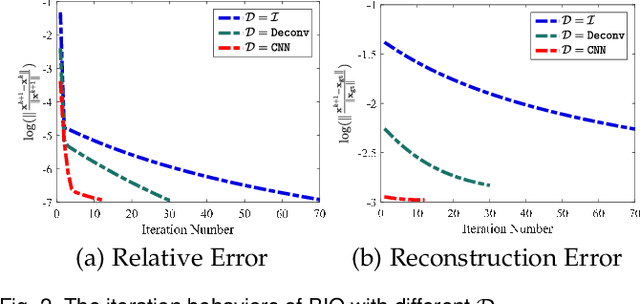
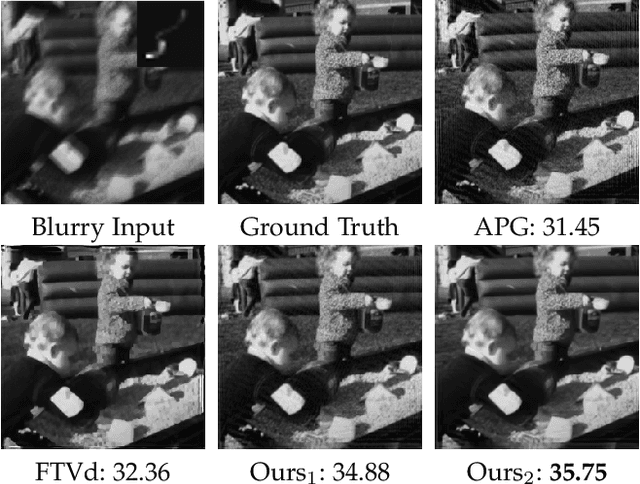
Classical optimization techniques often formulate the feasibility of the problems as set, equality or inequality constraints. However, explicitly designing these constraints is indeed challenging for complex real-world applications and too strict constraints may even lead to intractable optimization problems. On the other hand, it is still hard to incorporate data-dependent information into conventional numerical iterations. To partially address the above limits and inspired by the leader-follower gaming perspective, this work first introduces a bilevel-type formulation to jointly investigate the feasibility and optimality of nonconvex and nonsmooth optimization problems. Then we develop an algorithmic framework to couple forward-backward proximal computations to optimize our established bilevel leader-follower model. We prove its convergence and estimate the convergence rate. Furthermore, a learning-based extension is developed, in which we establish an unrolling strategy to incorporate data-dependent network architectures into our iterations. Fortunately, it can be proved that by introducing some mild checking conditions, all our original convergence results can still be preserved for this learnable extension. As a nontrivial byproduct, we demonstrate how to apply this ensemble-like methodology to address different low-level vision tasks. Extensive experiments verify the theoretical results and show the advantages of our method against existing state-of-the-art approaches.