 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning When-to-Treat Policies
Paper and Code
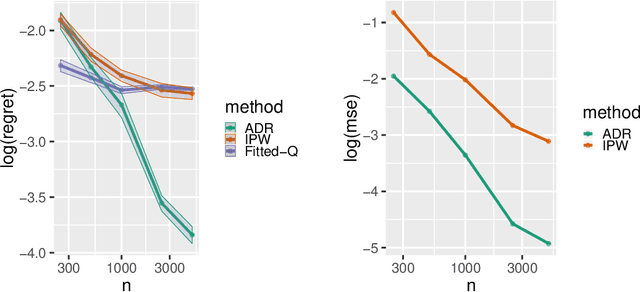
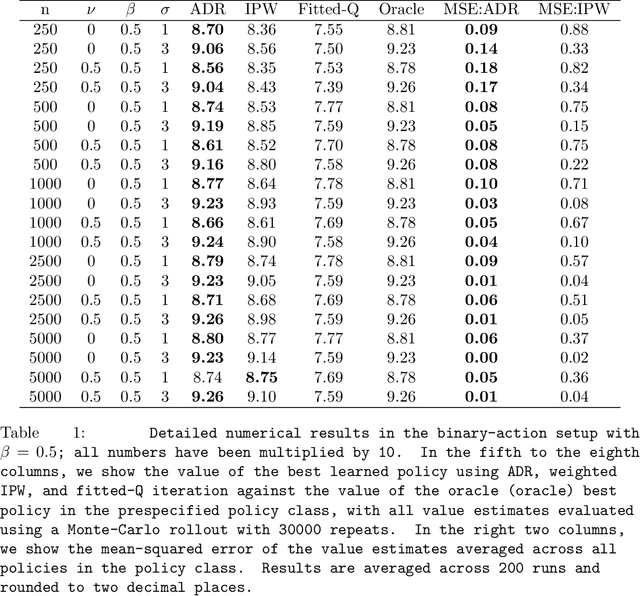
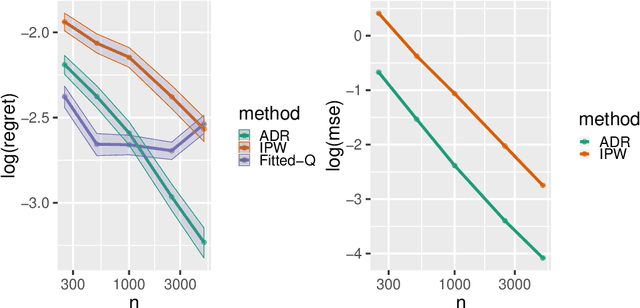
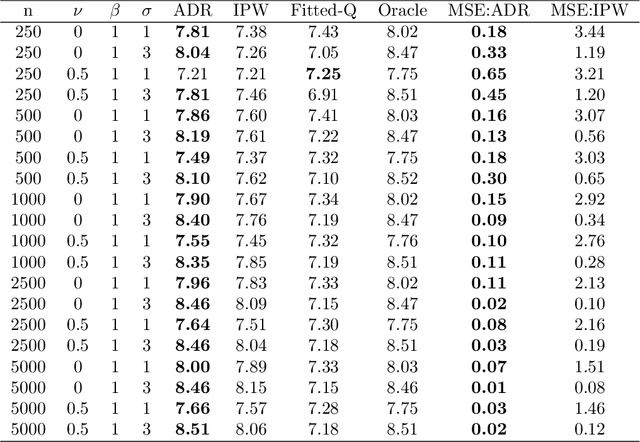
Many applied decision-making problems have a dynamic component: The policymaker needs not only to choose whom to treat, but also when to start which treatment. For example, a medical doctor may see a patient many times and, at each visit, need to choose between prescribing either an invasive or a non-invasive procedure and postponing the decision to the next visit. In this paper, we develop an \say{advantage doubly robust} estimator for learning such dynamic treatment rules using observational data under sequential ignorability. We prove welfare regret bounds that generalize results for doubly robust learning in the single-step setting, and show promising empirical performance in several different contexts. Our approach is practical for policy optimization, and does not need any structural (e.g., Markovian) assumptions.