 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollaborative Evolutionary Reinforcement Learning
Paper and Code
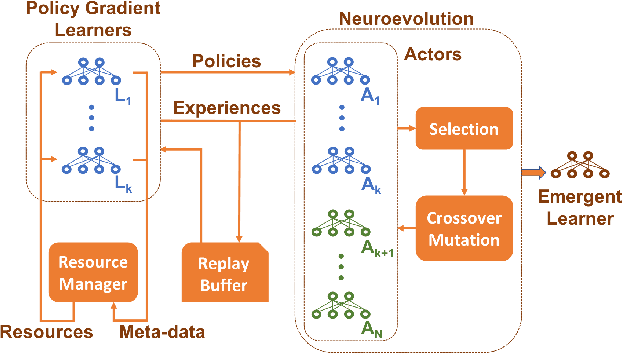
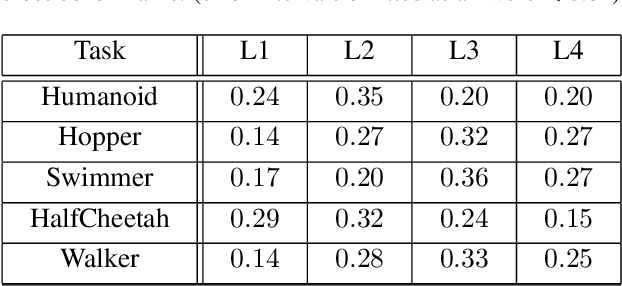
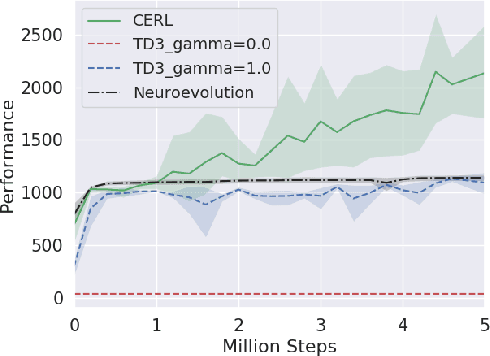
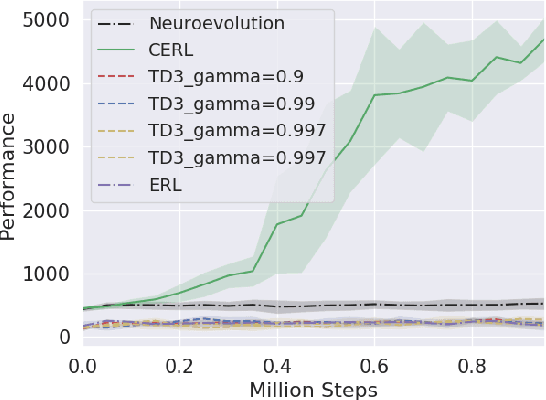
Deep reinforcement learning algorithms have been successfully applied to a range of challenging control tasks. However, these methods typically struggle with achieving effective exploration and are extremely sensitive to the choice of hyperparameters. One reason is that most approaches use a noisy version of their operating policy to explore - thereby limiting the range of exploration. In this paper, we introduce Collaborative Evolutionary Reinforcement Learning (CERL), a scalable framework that comprises a portfolio of policies that simultaneously explore and exploit diverse regions of the solution space. A collection of learners - typically proven algorithms like TD3 - optimize over varying time-horizons leading to this diverse portfolio. All learners contribute to and use a shared replay buffer to achieve greater sample efficiency. Computational resources are dynamically distributed to favor the best learners as a form of online algorithm selection. Neuroevolution binds this entire process to generate a single emergent learner that exceeds the capabilities of any individual learner. Experiments in a range of continuous control benchmarks demonstrate that the emergent learner significantly outperforms its composite learners while remaining overall more sample-efficient - notably solving the Mujoco Humanoid benchmark where all of its composite learners (TD3) fail entirely in isolation.