Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Variance for Changing Sparse-Reward Environments
Paper and Code
Mar 15, 2019
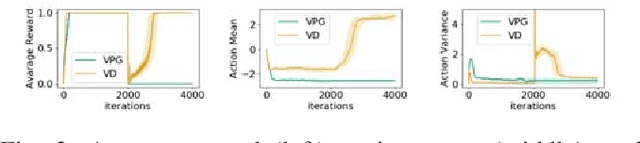
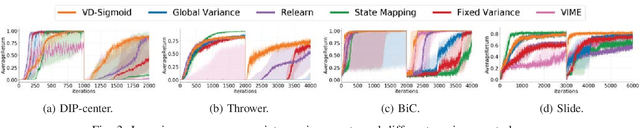

Robots that are trained to perform a task in a fixed environment often fail when facing unexpected changes to the environment due to a lack of exploration. We propose a principled way to adapt the policy for better exploration in changing sparse-reward environments. Unlike previous works which explicitly model environmental changes, we analyze the relationship between the value function and the optimal exploration for a Gaussian-parameterized policy and show that our theory leads to an effective strategy for adjusting the variance of the policy, enabling fast adapt to changes in a variety of sparse-reward environments.
* Accepted as a conference at International Conference on Robotics and
Automation(ICRA) 2019
View paper on